SISTEMAS DE CONTROLE I
Um sistema de controle de posição de braço de robô, representado no diagrama de blocos abaixo, tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saída: velocidade v(t) dada em metros por segundo, e deslocamento y(t) dado em metros.

O comportamento dinâmico do sistema é dado pela equação diferencial:
%7D%7D%7D%7B%7B%7B%5Cleft.%7Bd%7D%7Bt%7D%5Cright.%7D%7D%5E%7B%7B2%7D%7D%7D%2B%7Bb%7D.%5Cfrac%7B%7B%7B%5Cleft.%7Bd%7D%7By%7D%5Cright.%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%7D%7B%7B%5Cleft.%7Bd%7D%7Bt%7D%7D%7D%2B%7Bc%7D.%7By%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%3D%7Bk%7D.%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "a.(d^2y(t))/dt^2+b.(dy(t))/dt+c.y(t)=k.u(t)")
sendo k=1, a=1, b=5 e c=6.
As funções de transferência a serem inseridas nos blocos para substituir G1(s) e G2(s), e que permitem representar o sistema pelo diagrama de blocos abaixo são, respectivamente:
") e
e 
%7D.%7B%5Cleft(%7Bs%7D%2B%7B3%7D%5Cright)%7D%7D%7D "1/((s+2).(s+3))") e
e %7D.%7B%5Cleft(%7Bs%7D%2B%7B3%7D%5Cright)%7D%7D%7D "s/((s+2).(s+3))")
e 
e 
e
A figura abaixo mostra um servo-sistema posicionador de braço de robô, onde K é o ganho ajustável de um controlador, utilizado para realizar o controle da posição do braço.

Dentre as expressões de I a V listadas ao lado da figura, qual representa a função de transferência C(s)/R(s)?
V
II
I
IV
III
Considere função de transferência de um determinado sistema dado por:
%7D%7D%7D%7B%7B%7BX%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7B10%7D.%7Bs%7D%2B%7B10%7D%7D%7D%7B%7B%7Bs%7D.%7B%5Cleft(%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B5%7D.%7Bs%7D%2B%7B6%7D%5Cright)%7D%7D%7D)
Analise as afirmativas:
I - O sistema tem três pólos e um zero
II - Trata-se de um sistema de ordem 3
III - o ganho do sistema é zero
IV - Y(s) é a variável de entrada do sistema, e X(s) é a variável de saída
A resposta correta está na alternativa:
I, II e III
I, III e IV
I e II
I e III
II, III e IV
Considere um circuito série formado pela ligação de um resistor R, um indutor L, e uma fonte de tensão de excitação vi(t).
Considerando a tensão resistor vR(t) como sendo a variável de resposta vo(t) , a equação diferencial e a função de transferência que relaciona as variáveis de excitação e resposta deste sistema são, respectivamente.
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L/R).s+1
(L/R) . dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L.s+R)
dvR(t)/dt +(L/R).vR(t) = vi(t) e 1/((L/R).s+1)
L.dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
O diagrama de blocos da figura abaixo apresenta um sistema de controle em malha fechada de primeira ordem, sendo que K é o ganho do controlador, Kp e Tp são o ganho e a constante de tempo do processo. O gráfico mostra a resposta do sistema a uma entrada degrau de amplitude 100.

As opções abaixo apresentam conjuntos de valores numéricos para K, Kp e Tp. Marque a opção que utilizada, produzirá a resposta c(t) dada no gráfico.
K=2, Kp=9.5, Tp=1
K=19, Kp=1, Tp=5
K=1, Kp=19, Tp=10
K=1, Kp=19, Tp=5
K=9.5, Kp=1, Tp=10
A figura abaixo apresenta três respostas típicas de sistemas de primeira ordem, a entradas do tipo degrau unitário, numeradas com 1, 2 e 3.

Considerando c(t) a variável de saída e t a variável tempo, analise as afirmativas:
I - As respostas 1 e 2 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com o mesmo ganho, porém com constantes de tempos diferentes.
II - As respostas 1 e 3 são de sistemas com constantes de tempo e ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes
III - As respostas 2 e 3 são de sistemas com constantes de tempo diferentes, porém com ganhos iguais, enquanto que as respostas 1 e 3 são de sistemas com constantes de tempo iguais e ganhos diferentes.
Estão corretas as afirmativas:
I apenas.
II apenas.
I e III
II e III
I e II
As funções de transferência são modelos matemáticos que permitem representar os sistemas físicos, e são utilizados para fazer simulações computacionais desses sistemas, análise de seu comportamento dinâmico, e inclusive ajustes de parâmetros para adequar sua resposta a excitações externas.
Sobre funções de transferência, considere as afirmativas:
I - É definido pela razão entre a transformada de Laplace da entrada (função ou variável de excitação) e a transformada de Laplace da saída do sistema (função ou variável de resposta).
II - determinação da função de transferência deve-se considerar nulas as condições iniciais, ou seja, que o sistema não possui energia armazenda internamente antes da aplicação da excitação.
III - As funções de transferência são obtidas aplicando-se a Transformada de Laplace às equações diferenciais, convertendo-as em equações algébricas, reduzindo a complexidade dos modelos matemáticos.
IV - A função de transferência de é uma propriedade do próprio sistema, independente das variáveis de entrada e saída, e seus pólos e zeros dependerão apenas do parâmetros físicos do sistema.
V - O conceito de funções de transferência são aplicáveis aos sistemas lineares invariantes no tempo, os quais podem ser representados por equações diferenciais lineares ordinárias.
São corretas as afirmativas:
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
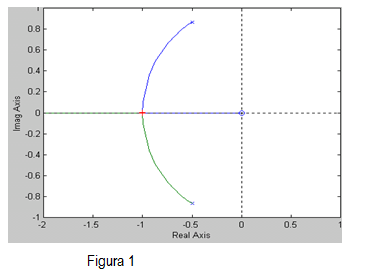
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.

O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
A figura abaixo mostra um servo-sistema posicionador de braço de robô, onde K é o ganho ajustável de um controlador, utilizado para realizar o controle da posição do braço.
Dentre as expressões de I a V listadas ao lado da figura, qual representa a função de transferência C(s)/R(s)?
V
II
I
IV
III
Considere função de transferência de um determinado sistema dado por:
Analise as afirmativas:
I - O sistema tem três pólos e um zero
II - Trata-se de um sistema de ordem 3
III - o ganho do sistema é zero
IV - Y(s) é a variável de entrada do sistema, e X(s) é a variável de saída
A resposta correta está na alternativa:
I, II e III
I, III e IV
I e II
I e III
II, III e IV
Considere um circuito série formado pela ligação de um resistor R, um indutor L, e uma fonte de tensão de excitação vi(t).
Considerando a tensão resistor vR(t) como sendo a variável de resposta vo(t) , a equação diferencial e a função de transferência que relaciona as variáveis de excitação e resposta deste sistema são, respectivamente.
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L/R).s+1
(L/R) . dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L.s+R)
dvR(t)/dt +(L/R).vR(t) = vi(t) e 1/((L/R).s+1)
L.dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
O diagrama de blocos da figura abaixo apresenta um sistema de controle em malha fechada de primeira ordem, sendo que K é o ganho do controlador, Kp e Tp são o ganho e a constante de tempo do processo. O gráfico mostra a resposta do sistema a uma entrada degrau de amplitude 100.
As opções abaixo apresentam conjuntos de valores numéricos para K, Kp e Tp. Marque a opção que utilizada, produzirá a resposta c(t) dada no gráfico.
K=2, Kp=9.5, Tp=1
K=19, Kp=1, Tp=5
K=1, Kp=19, Tp=10
K=1, Kp=19, Tp=5
K=9.5, Kp=1, Tp=10
A figura abaixo apresenta três respostas típicas de sistemas de primeira ordem, a entradas do tipo degrau unitário, numeradas com 1, 2 e 3.
Considerando c(t) a variável de saída e t a variável tempo, analise as afirmativas:
I - As respostas 1 e 2 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com o mesmo ganho, porém com constantes de tempos diferentes.
II - As respostas 1 e 3 são de sistemas com constantes de tempo e ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes
III - As respostas 2 e 3 são de sistemas com constantes de tempo diferentes, porém com ganhos iguais, enquanto que as respostas 1 e 3 são de sistemas com constantes de tempo iguais e ganhos diferentes.
Estão corretas as afirmativas:
I apenas.
II apenas.
I e III
II e III
I e II
As funções de transferência são modelos matemáticos que permitem representar os sistemas físicos, e são utilizados para fazer simulações computacionais desses sistemas, análise de seu comportamento dinâmico, e inclusive ajustes de parâmetros para adequar sua resposta a excitações externas.
Sobre funções de transferência, considere as afirmativas:
I - É definido pela razão entre a transformada de Laplace da entrada (função ou variável de excitação) e a transformada de Laplace da saída do sistema (função ou variável de resposta).
II - determinação da função de transferência deve-se considerar nulas as condições iniciais, ou seja, que o sistema não possui energia armazenda internamente antes da aplicação da excitação.
III - As funções de transferência são obtidas aplicando-se a Transformada de Laplace às equações diferenciais, convertendo-as em equações algébricas, reduzindo a complexidade dos modelos matemáticos.
IV - A função de transferência de é uma propriedade do próprio sistema, independente das variáveis de entrada e saída, e seus pólos e zeros dependerão apenas do parâmetros físicos do sistema.
V - O conceito de funções de transferência são aplicáveis aos sistemas lineares invariantes no tempo, os quais podem ser representados por equações diferenciais lineares ordinárias.
São corretas as afirmativas:
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
V
II
I
IV
III
Considere função de transferência de um determinado sistema dado por:
Analise as afirmativas:
I - O sistema tem três pólos e um zero
II - Trata-se de um sistema de ordem 3
III - o ganho do sistema é zero
IV - Y(s) é a variável de entrada do sistema, e X(s) é a variável de saída
A resposta correta está na alternativa:
I, II e III
I, III e IV
I e II
I e III
II, III e IV
Considere um circuito série formado pela ligação de um resistor R, um indutor L, e uma fonte de tensão de excitação vi(t).
Considerando a tensão resistor vR(t) como sendo a variável de resposta vo(t) , a equação diferencial e a função de transferência que relaciona as variáveis de excitação e resposta deste sistema são, respectivamente.
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L/R).s+1
(L/R) . dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L.s+R)
dvR(t)/dt +(L/R).vR(t) = vi(t) e 1/((L/R).s+1)
L.dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
O diagrama de blocos da figura abaixo apresenta um sistema de controle em malha fechada de primeira ordem, sendo que K é o ganho do controlador, Kp e Tp são o ganho e a constante de tempo do processo. O gráfico mostra a resposta do sistema a uma entrada degrau de amplitude 100.
As opções abaixo apresentam conjuntos de valores numéricos para K, Kp e Tp. Marque a opção que utilizada, produzirá a resposta c(t) dada no gráfico.
K=2, Kp=9.5, Tp=1
K=19, Kp=1, Tp=5
K=1, Kp=19, Tp=10
K=1, Kp=19, Tp=5
K=9.5, Kp=1, Tp=10
A figura abaixo apresenta três respostas típicas de sistemas de primeira ordem, a entradas do tipo degrau unitário, numeradas com 1, 2 e 3.
Considerando c(t) a variável de saída e t a variável tempo, analise as afirmativas:
I - As respostas 1 e 2 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com o mesmo ganho, porém com constantes de tempos diferentes.
II - As respostas 1 e 3 são de sistemas com constantes de tempo e ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes
III - As respostas 2 e 3 são de sistemas com constantes de tempo diferentes, porém com ganhos iguais, enquanto que as respostas 1 e 3 são de sistemas com constantes de tempo iguais e ganhos diferentes.
Estão corretas as afirmativas:
I apenas.
II apenas.
I e III
II e III
I e II
As funções de transferência são modelos matemáticos que permitem representar os sistemas físicos, e são utilizados para fazer simulações computacionais desses sistemas, análise de seu comportamento dinâmico, e inclusive ajustes de parâmetros para adequar sua resposta a excitações externas.
Sobre funções de transferência, considere as afirmativas:
I - É definido pela razão entre a transformada de Laplace da entrada (função ou variável de excitação) e a transformada de Laplace da saída do sistema (função ou variável de resposta).
II - determinação da função de transferência deve-se considerar nulas as condições iniciais, ou seja, que o sistema não possui energia armazenda internamente antes da aplicação da excitação.
III - As funções de transferência são obtidas aplicando-se a Transformada de Laplace às equações diferenciais, convertendo-as em equações algébricas, reduzindo a complexidade dos modelos matemáticos.
IV - A função de transferência de é uma propriedade do próprio sistema, independente das variáveis de entrada e saída, e seus pólos e zeros dependerão apenas do parâmetros físicos do sistema.
V - O conceito de funções de transferência são aplicáveis aos sistemas lineares invariantes no tempo, os quais podem ser representados por equações diferenciais lineares ordinárias.
São corretas as afirmativas:
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
I, II e III
I, III e IV
I e II
I e III
II, III e IV
Considere um circuito série formado pela ligação de um resistor R, um indutor L, e uma fonte de tensão de excitação vi(t).
Considerando a tensão resistor vR(t) como sendo a variável de resposta vo(t) , a equação diferencial e a função de transferência que relaciona as variáveis de excitação e resposta deste sistema são, respectivamente.
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L/R).s+1
(L/R) . dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L.s+R)
dvR(t)/dt +(L/R).vR(t) = vi(t) e 1/((L/R).s+1)
L.dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
O diagrama de blocos da figura abaixo apresenta um sistema de controle em malha fechada de primeira ordem, sendo que K é o ganho do controlador, Kp e Tp são o ganho e a constante de tempo do processo. O gráfico mostra a resposta do sistema a uma entrada degrau de amplitude 100.
As opções abaixo apresentam conjuntos de valores numéricos para K, Kp e Tp. Marque a opção que utilizada, produzirá a resposta c(t) dada no gráfico.
K=2, Kp=9.5, Tp=1
K=19, Kp=1, Tp=5
K=1, Kp=19, Tp=10
K=1, Kp=19, Tp=5
K=9.5, Kp=1, Tp=10
A figura abaixo apresenta três respostas típicas de sistemas de primeira ordem, a entradas do tipo degrau unitário, numeradas com 1, 2 e 3.
Considerando c(t) a variável de saída e t a variável tempo, analise as afirmativas:
I - As respostas 1 e 2 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com o mesmo ganho, porém com constantes de tempos diferentes.
II - As respostas 1 e 3 são de sistemas com constantes de tempo e ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes
III - As respostas 2 e 3 são de sistemas com constantes de tempo diferentes, porém com ganhos iguais, enquanto que as respostas 1 e 3 são de sistemas com constantes de tempo iguais e ganhos diferentes.
Estão corretas as afirmativas:
I apenas.
II apenas.
I e III
II e III
I e II
As funções de transferência são modelos matemáticos que permitem representar os sistemas físicos, e são utilizados para fazer simulações computacionais desses sistemas, análise de seu comportamento dinâmico, e inclusive ajustes de parâmetros para adequar sua resposta a excitações externas.
Sobre funções de transferência, considere as afirmativas:
I - É definido pela razão entre a transformada de Laplace da entrada (função ou variável de excitação) e a transformada de Laplace da saída do sistema (função ou variável de resposta).
II - determinação da função de transferência deve-se considerar nulas as condições iniciais, ou seja, que o sistema não possui energia armazenda internamente antes da aplicação da excitação.
III - As funções de transferência são obtidas aplicando-se a Transformada de Laplace às equações diferenciais, convertendo-as em equações algébricas, reduzindo a complexidade dos modelos matemáticos.
IV - A função de transferência de é uma propriedade do próprio sistema, independente das variáveis de entrada e saída, e seus pólos e zeros dependerão apenas do parâmetros físicos do sistema.
V - O conceito de funções de transferência são aplicáveis aos sistemas lineares invariantes no tempo, os quais podem ser representados por equações diferenciais lineares ordinárias.
São corretas as afirmativas:
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L/R).s+1
(L/R) . dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
(L/R) . dvR(t)/dt +v R(t) = vi(t) e 1/(L.s+R)
dvR(t)/dt +(L/R).vR(t) = vi(t) e 1/((L/R).s+1)
L.dvR(t)/dt +vR(t) = vi(t) e 1/((L/R).s+1)
O diagrama de blocos da figura abaixo apresenta um sistema de controle em malha fechada de primeira ordem, sendo que K é o ganho do controlador, Kp e Tp são o ganho e a constante de tempo do processo. O gráfico mostra a resposta do sistema a uma entrada degrau de amplitude 100.
As opções abaixo apresentam conjuntos de valores numéricos para K, Kp e Tp. Marque a opção que utilizada, produzirá a resposta c(t) dada no gráfico.
K=2, Kp=9.5, Tp=1
K=19, Kp=1, Tp=5
K=1, Kp=19, Tp=10
K=1, Kp=19, Tp=5
K=9.5, Kp=1, Tp=10
A figura abaixo apresenta três respostas típicas de sistemas de primeira ordem, a entradas do tipo degrau unitário, numeradas com 1, 2 e 3.
Considerando c(t) a variável de saída e t a variável tempo, analise as afirmativas:
I - As respostas 1 e 2 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com o mesmo ganho, porém com constantes de tempos diferentes.
II - As respostas 1 e 3 são de sistemas com constantes de tempo e ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes
III - As respostas 2 e 3 são de sistemas com constantes de tempo diferentes, porém com ganhos iguais, enquanto que as respostas 1 e 3 são de sistemas com constantes de tempo iguais e ganhos diferentes.
Estão corretas as afirmativas:
I apenas.
II apenas.
I e III
II e III
I e II
As funções de transferência são modelos matemáticos que permitem representar os sistemas físicos, e são utilizados para fazer simulações computacionais desses sistemas, análise de seu comportamento dinâmico, e inclusive ajustes de parâmetros para adequar sua resposta a excitações externas.
Sobre funções de transferência, considere as afirmativas:
I - É definido pela razão entre a transformada de Laplace da entrada (função ou variável de excitação) e a transformada de Laplace da saída do sistema (função ou variável de resposta).
II - determinação da função de transferência deve-se considerar nulas as condições iniciais, ou seja, que o sistema não possui energia armazenda internamente antes da aplicação da excitação.
III - As funções de transferência são obtidas aplicando-se a Transformada de Laplace às equações diferenciais, convertendo-as em equações algébricas, reduzindo a complexidade dos modelos matemáticos.
IV - A função de transferência de é uma propriedade do próprio sistema, independente das variáveis de entrada e saída, e seus pólos e zeros dependerão apenas do parâmetros físicos do sistema.
V - O conceito de funções de transferência são aplicáveis aos sistemas lineares invariantes no tempo, os quais podem ser representados por equações diferenciais lineares ordinárias.
São corretas as afirmativas:
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
K=2, Kp=9.5, Tp=1
K=19, Kp=1, Tp=5
K=1, Kp=19, Tp=10
K=1, Kp=19, Tp=5
K=9.5, Kp=1, Tp=10
A figura abaixo apresenta três respostas típicas de sistemas de primeira ordem, a entradas do tipo degrau unitário, numeradas com 1, 2 e 3.
Considerando c(t) a variável de saída e t a variável tempo, analise as afirmativas:
I - As respostas 1 e 2 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com o mesmo ganho, porém com constantes de tempos diferentes.
II - As respostas 1 e 3 são de sistemas com constantes de tempo e ganhos diferentes, enquanto que as respostas 2 e 3 são de sistemas com a mesma constante de tempo, porém com ganhos diferentes
III - As respostas 2 e 3 são de sistemas com constantes de tempo diferentes, porém com ganhos iguais, enquanto que as respostas 1 e 3 são de sistemas com constantes de tempo iguais e ganhos diferentes.
Estão corretas as afirmativas:
I apenas.
II apenas.
I e III
II e III
I e II
As funções de transferência são modelos matemáticos que permitem representar os sistemas físicos, e são utilizados para fazer simulações computacionais desses sistemas, análise de seu comportamento dinâmico, e inclusive ajustes de parâmetros para adequar sua resposta a excitações externas.
Sobre funções de transferência, considere as afirmativas:
I - É definido pela razão entre a transformada de Laplace da entrada (função ou variável de excitação) e a transformada de Laplace da saída do sistema (função ou variável de resposta).
II - determinação da função de transferência deve-se considerar nulas as condições iniciais, ou seja, que o sistema não possui energia armazenda internamente antes da aplicação da excitação.
III - As funções de transferência são obtidas aplicando-se a Transformada de Laplace às equações diferenciais, convertendo-as em equações algébricas, reduzindo a complexidade dos modelos matemáticos.
IV - A função de transferência de é uma propriedade do próprio sistema, independente das variáveis de entrada e saída, e seus pólos e zeros dependerão apenas do parâmetros físicos do sistema.
V - O conceito de funções de transferência são aplicáveis aos sistemas lineares invariantes no tempo, os quais podem ser representados por equações diferenciais lineares ordinárias.
São corretas as afirmativas:
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
I apenas.
II apenas.
I e III
II e III
I e II
As funções de transferência são modelos matemáticos que permitem representar os sistemas físicos, e são utilizados para fazer simulações computacionais desses sistemas, análise de seu comportamento dinâmico, e inclusive ajustes de parâmetros para adequar sua resposta a excitações externas.
Sobre funções de transferência, considere as afirmativas:
I - É definido pela razão entre a transformada de Laplace da entrada (função ou variável de excitação) e a transformada de Laplace da saída do sistema (função ou variável de resposta).
II - determinação da função de transferência deve-se considerar nulas as condições iniciais, ou seja, que o sistema não possui energia armazenda internamente antes da aplicação da excitação.
III - As funções de transferência são obtidas aplicando-se a Transformada de Laplace às equações diferenciais, convertendo-as em equações algébricas, reduzindo a complexidade dos modelos matemáticos.
IV - A função de transferência de é uma propriedade do próprio sistema, independente das variáveis de entrada e saída, e seus pólos e zeros dependerão apenas do parâmetros físicos do sistema.
V - O conceito de funções de transferência são aplicáveis aos sistemas lineares invariantes no tempo, os quais podem ser representados por equações diferenciais lineares ordinárias.
São corretas as afirmativas:
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
I, III, IV, V
I, II, III, V
II, III, IV, V
I, II, III, IV
I, II, III, IV, V
O gráfico no lugar das raízes de um sistema de controle com realimentação unitária, e com controlador é do tipo proporcional, é dado na figura 1:
Quanto os pólos do sistema de controle em malha fechada, dependendo do valor de K, é correto afirmar que:
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
Podem tornar-se puramente imaginários;
O sistema possui 3 polos
Podem ser reais e distintos, reais e iguais, ou complexos conjugados
Podem tender todos ao infinito, se o valor de K for muito alto;
Podem tender à região de instabilidade, se o valor de K for muito alto;
Sobre sistemas de controle de malha aberta e de malha fechada, analise as seguintes afirmativas:
I- A qualidade e precisão dos componentes da planta são fatores críticos para o desempenho dos sistemas de controle, sendo mais
críticos para os sistemas em malha aberta do que para os de malha fechada;
II- A manutenção preventiva é mais importante nos sistemas de malha aberta do que nos sistemas de malha fechada;
III- Sistemas de malha aberta são mais indicados em aplicações onde as plantas estão sujeitas a ruídos e perturbações oriundas do ambiente.
Com ralação ao conteúdo das informações, pode-se concluir que:
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
Somente a afirmativa I está correta.
Duas afirmativas estão corretas: I e II
Todas as afirmativas estão corretas.
Somente a afirmativa III está correta.
Somente a afirmativa II está correta.
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
As variáves definidas como PV, SP e MV para o controle de temperatura da água em malha fechada são, respectivamente:
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor
Temperatura desejada para a água na saída, temperatura da água aquecida na saída, vazão de vapor
Temperatura água fria, temperatura da água aquecida na saída, vazão de vapor
Temperatura da água aquecida na saída, temperatura desejada para água na saída, vazão de entrada de água fria
Temperatura desejada para água na saída, temperatura da água aquecida na saída, vazão de saída água quente
Temperatura da água aquecida na saída, temperatura desejada para a água na saída, vazão de vapor