SISTEMAS DE CONTROLE I
Um diagrama de blocos possui como função de transferência F(s) resultante, oriunda de uma realimentação negativa de valor 1, a alternativa que representa a função antes de ser reduzida é:
F(s) = 0.5/(10.s+1)
0.25/(10.s+1)
0.5/(20.s+1)
0.5/(10.s+1)
1/(20.s+1)
1/(10.s+1)
Dado o sistema elétrico da figura abaixo, sendo Vi a tensão de entrada e Vo a tensão de saída; e um diagrama de blocos que deverá ser utilizado para representar o sistema, utilizando funções no domínio da frequência.
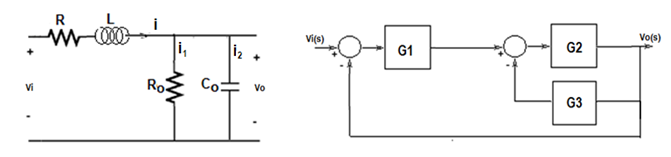
O diagrama de blocos representará corretamente o sistema elétrico se as funções G1, G2 e G3 forem iguais a:
G1(s)=1/(L.s+R) G2(s)=1/Ro G3(s)=1/(Co.s)
G1(s)=L.s+R G2(s)=Ro G3(s)=Co.s
G1(s)=1/(L.s+R) G2(s)=Ro G3(s)=1/Co.s
G1(s)=1/(L.s+R) G2(s)=Ro G3(s)=Co.s
G1(s)=1/(L.s+R) G2(s)=1/Ro G3(s)=Co.s
O amplificador operacional é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle.
Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não há diferença de potencial entre as mesmos ("curto-circuito virtual").
No sistema abaixo, empregando-se essas considerações, chega-se ao conjunto de equações dado:

Aplicando a transformada de Laplace no conjunto de equações dado, obtém-se Eo(s) em função de Ei(s).
Essa função será:
%7D%3D%5Cfrac%7B%7B%7BR%7D%7B1%7D%2B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B2%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B1%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=(R1+R2)/(R2). 1/(R1.C.s+1). Ei(s)")
%7D%3D-%5Cfrac%7B%7B%7BR%7D%7B1%7D%2B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B1%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=-(R1+R2)/(R1). 1/(R1.C.s+1). Ei(s)") `
`
%7D%3D%5Cfrac%7B%7B%7BR%7D%7B1%7D%2B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B1%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=(R1+R2)/(R1). 1/(R1.C.s+1).Ei(s)")
%7D%3D%5Cfrac%7B%7B%7BR%7D%7B1%7D%2B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7B%5Cleft(%7BR%7D%7B1%7D%2B%7BC%7D%5Cright)%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=(R1+R2)/(R1). 1/((R1+C).s+1). Ei(s)")
%7D%3D%5Cfrac%7B%7B%7BR%7D%7B1%7D%2B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B2%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=(R1+R2)/(R1). 1/(R2.C.s+1). Ei(s)")
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional,
sendo ei a tensão de entrada e eo a tensão de saída, no domínio do tempo.
A equação diferencial relacionando eo e ei em função de R1, R2 e C

Aplicando a transformada de Laplace na EDO dada, a tensão de saída Eo(s) será:
%7D%3D-%5Cfrac%7B%7B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B2%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=-(R2)/(R1). 1/(R2.C.s+1).Ei(s)")
%7D%3D-%5Cfrac%7B%7B%7BR%7D%7B1%7D%7D%7D%7B%7B%7BR%7D%7B2%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B2%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=-(R1)/(R2). 1/(R2.C.s+1).Ei(s)")
%7D%3D%5Cfrac%7B%7B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B2%7D%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=(R2)/(R1). 1/(R2C.s+1).Ei(s)")
%7D%3D-%5Cfrac%7B%7B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B1%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=-(R2)/(R1). 1/(R1.C.s+1).Ei(s)")
%7D%3D-%5Cfrac%7B%7B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%5Cfrac%7B%7B1%7D%7D%7B%7B%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D.%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D "Eo(s)=-(R2)/(R1). 1/(C.s+1).Ei(s)")
Na figura 1 é apresentado o gráfico do lugar das raízes de um sistema de controle, com realimentação unitária e controlador com parâmetro ajustável K.
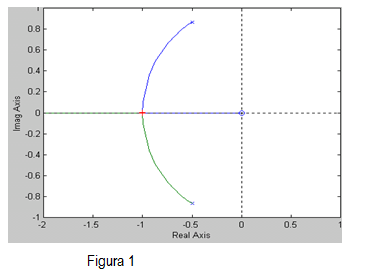
Considerando a faixa de valores de K que torna o sistema oscilatório, o aumento do ganho do controlador pode provocar vários efeitos na resposta do sistema dentre eles:
I - Aumentar a frequência das oscilações
II - Aumentar o overshoot;
III - Melhorar a estabilidade do sistema
IV - Eliminar as oscilações
V - Reduzir o tempo de resposta transitória
Marque, dentre as alternativas a seguir, a que contém as afirmativas corretas.
II, III, IV e V
I, II, III e IV
I, II, III, IV e V
I, III, IV e V
III, IV e V
A Figura abaixo apresenta o gráfico do lugar das raízes para um sistema de malha fechada, com realimentação unitária, e controlador proporcional, com ganho ajustável K.
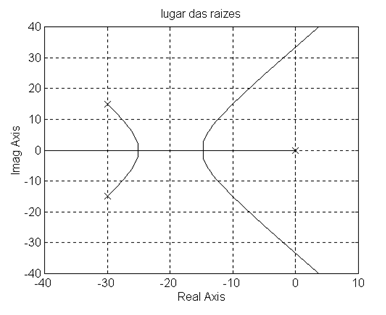
Analise as informações apresentadas no gráfico do lugar das raízes, e avalie a veracidade das afirmativas a seguir
I - Para 6250<K<6750 o sistema apresentará respostas oscilatórias
II - para 6250<K<6750 o sistema terá três polos reais
III - O sistema terá polos complexos conjugados para K<6250 e K>6750
IV - Para que os pólos tenham parte real igual a -10, o valor de K será K=12500
V - O valor de K que torna o sistema instável é maior que 67000
Assinale a alternativa correta.
III, IV e V
II, III, IV
II, III, IV e V
II, IV e V
I, II, III e IV
Sobre sistemas de controle de malha aberta e de malha fechada, analise as afirmativas abaixo:
I. Nos sistemas de controle de malha fechada a saída é realimentada para ser comparada com entrada de referência, e gerar o sinal de erro;
II. Os sistemas de controle de malha aberta operam por base de tempo, e a saída depende de uma boa calibração dos componentes do sistema;
III. Sistemas de controle de malha aberta e de malha fechada possuem controladores, que executam programas para gerar as ações de controle sobre o processo.
Pode-se concluir que:
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
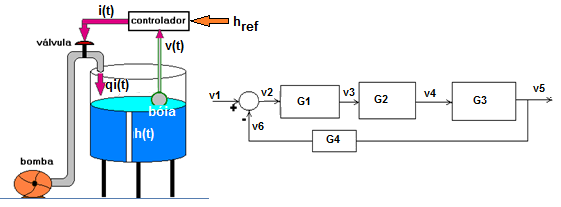
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
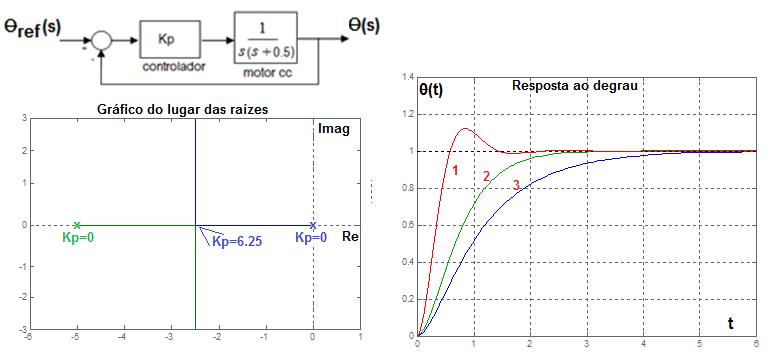
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
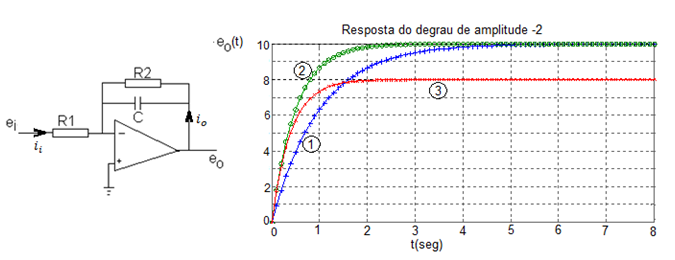
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: %7D%7D%7D%7B%7B%5Cleft.%7Bd%7D%7Bt%7D%7D%7D%2B%7Be%7D%7Bo%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%3D-%5Cfrac%7B%7B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%7Be%7D%7Bi%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D) `
`
II - A função de transferência que representa o sistema é: %7D%7D%7D%7B%7B%7BE%7D%7Bi%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7BR%7D%7B2%7D%7D%7D%7B%7B%7BR%7D%7B1%7D%7D%7D.%7B%5Cleft(%5Cfrac%7B%7B1%7D%7D%7B%7B%7BR%7D%7B2%7D.%7BC%7D.%7Bs%7D%2B%7B1%7D%7D%7D%5Cright)%7D) `
`
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
0.25/(10.s+1)
0.5/(20.s+1)
0.5/(10.s+1)
1/(20.s+1)
1/(10.s+1)
Dado o sistema elétrico da figura abaixo, sendo Vi a tensão de entrada e Vo a tensão de saída; e um diagrama de blocos que deverá ser utilizado para representar o sistema, utilizando funções no domínio da frequência.
O diagrama de blocos representará corretamente o sistema elétrico se as funções G1, G2 e G3 forem iguais a:
G1(s)=1/(L.s+R) G2(s)=1/Ro G3(s)=1/(Co.s)
G1(s)=L.s+R G2(s)=Ro G3(s)=Co.s
G1(s)=1/(L.s+R) G2(s)=Ro G3(s)=1/Co.s
G1(s)=1/(L.s+R) G2(s)=Ro G3(s)=Co.s
G1(s)=1/(L.s+R) G2(s)=1/Ro G3(s)=Co.s
O amplificador operacional é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle.
Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não há diferença de potencial entre as mesmos ("curto-circuito virtual").
No sistema abaixo, empregando-se essas considerações, chega-se ao conjunto de equações dado:
Aplicando a transformada de Laplace no conjunto de equações dado, obtém-se Eo(s) em função de Ei(s).
Essa função será:
`
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional,
sendo ei a tensão de entrada e eo a tensão de saída, no domínio do tempo.
A equação diferencial relacionando eo e ei em função de R1, R2 e C
Aplicando a transformada de Laplace na EDO dada, a tensão de saída Eo(s) será:
Na figura 1 é apresentado o gráfico do lugar das raízes de um sistema de controle, com realimentação unitária e controlador com parâmetro ajustável K.
Considerando a faixa de valores de K que torna o sistema oscilatório, o aumento do ganho do controlador pode provocar vários efeitos na resposta do sistema dentre eles:
I - Aumentar a frequência das oscilações
II - Aumentar o overshoot;
III - Melhorar a estabilidade do sistema
IV - Eliminar as oscilações
V - Reduzir o tempo de resposta transitória
Marque, dentre as alternativas a seguir, a que contém as afirmativas corretas.
II, III, IV e V
I, II, III e IV
I, II, III, IV e V
I, III, IV e V
III, IV e V
A Figura abaixo apresenta o gráfico do lugar das raízes para um sistema de malha fechada, com realimentação unitária, e controlador proporcional, com ganho ajustável K.
Analise as informações apresentadas no gráfico do lugar das raízes, e avalie a veracidade das afirmativas a seguir
I - Para 6250<K<6750 o sistema apresentará respostas oscilatórias
II - para 6250<K<6750 o sistema terá três polos reais
III - O sistema terá polos complexos conjugados para K<6250 e K>6750
IV - Para que os pólos tenham parte real igual a -10, o valor de K será K=12500
V - O valor de K que torna o sistema instável é maior que 67000
Assinale a alternativa correta.
III, IV e V
II, III, IV
II, III, IV e V
II, IV e V
I, II, III e IV
Sobre sistemas de controle de malha aberta e de malha fechada, analise as afirmativas abaixo:
I. Nos sistemas de controle de malha fechada a saída é realimentada para ser comparada com entrada de referência, e gerar o sinal de erro;
II. Os sistemas de controle de malha aberta operam por base de tempo, e a saída depende de uma boa calibração dos componentes do sistema;
III. Sistemas de controle de malha aberta e de malha fechada possuem controladores, que executam programas para gerar as ações de controle sobre o processo.
Pode-se concluir que:
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
G1(s)=1/(L.s+R) G2(s)=1/Ro G3(s)=1/(Co.s)
G1(s)=L.s+R G2(s)=Ro G3(s)=Co.s
G1(s)=1/(L.s+R) G2(s)=Ro G3(s)=1/Co.s
G1(s)=1/(L.s+R) G2(s)=Ro G3(s)=Co.s
G1(s)=1/(L.s+R) G2(s)=1/Ro G3(s)=Co.s
O amplificador operacional é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle.
Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não há diferença de potencial entre as mesmos ("curto-circuito virtual").
No sistema abaixo, empregando-se essas considerações, chega-se ao conjunto de equações dado:
Aplicando a transformada de Laplace no conjunto de equações dado, obtém-se Eo(s) em função de Ei(s).
Essa função será:
`
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional,
sendo ei a tensão de entrada e eo a tensão de saída, no domínio do tempo.
A equação diferencial relacionando eo e ei em função de R1, R2 e C
Aplicando a transformada de Laplace na EDO dada, a tensão de saída Eo(s) será:
Na figura 1 é apresentado o gráfico do lugar das raízes de um sistema de controle, com realimentação unitária e controlador com parâmetro ajustável K.
Considerando a faixa de valores de K que torna o sistema oscilatório, o aumento do ganho do controlador pode provocar vários efeitos na resposta do sistema dentre eles:
I - Aumentar a frequência das oscilações
II - Aumentar o overshoot;
III - Melhorar a estabilidade do sistema
IV - Eliminar as oscilações
V - Reduzir o tempo de resposta transitória
Marque, dentre as alternativas a seguir, a que contém as afirmativas corretas.
II, III, IV e V
I, II, III e IV
I, II, III, IV e V
I, III, IV e V
III, IV e V
A Figura abaixo apresenta o gráfico do lugar das raízes para um sistema de malha fechada, com realimentação unitária, e controlador proporcional, com ganho ajustável K.
Analise as informações apresentadas no gráfico do lugar das raízes, e avalie a veracidade das afirmativas a seguir
I - Para 6250<K<6750 o sistema apresentará respostas oscilatórias
II - para 6250<K<6750 o sistema terá três polos reais
III - O sistema terá polos complexos conjugados para K<6250 e K>6750
IV - Para que os pólos tenham parte real igual a -10, o valor de K será K=12500
V - O valor de K que torna o sistema instável é maior que 67000
Assinale a alternativa correta.
III, IV e V
II, III, IV
II, III, IV e V
II, IV e V
I, II, III e IV
Sobre sistemas de controle de malha aberta e de malha fechada, analise as afirmativas abaixo:
I. Nos sistemas de controle de malha fechada a saída é realimentada para ser comparada com entrada de referência, e gerar o sinal de erro;
II. Os sistemas de controle de malha aberta operam por base de tempo, e a saída depende de uma boa calibração dos componentes do sistema;
III. Sistemas de controle de malha aberta e de malha fechada possuem controladores, que executam programas para gerar as ações de controle sobre o processo.
Pode-se concluir que:
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
`
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional,
sendo ei a tensão de entrada e eo a tensão de saída, no domínio do tempo.
A equação diferencial relacionando eo e ei em função de R1, R2 e C
Aplicando a transformada de Laplace na EDO dada, a tensão de saída Eo(s) será:
Na figura 1 é apresentado o gráfico do lugar das raízes de um sistema de controle, com realimentação unitária e controlador com parâmetro ajustável K.
Considerando a faixa de valores de K que torna o sistema oscilatório, o aumento do ganho do controlador pode provocar vários efeitos na resposta do sistema dentre eles:
I - Aumentar a frequência das oscilações
II - Aumentar o overshoot;
III - Melhorar a estabilidade do sistema
IV - Eliminar as oscilações
V - Reduzir o tempo de resposta transitória
Marque, dentre as alternativas a seguir, a que contém as afirmativas corretas.
II, III, IV e V
I, II, III e IV
I, II, III, IV e V
I, III, IV e V
III, IV e V
A Figura abaixo apresenta o gráfico do lugar das raízes para um sistema de malha fechada, com realimentação unitária, e controlador proporcional, com ganho ajustável K.
Analise as informações apresentadas no gráfico do lugar das raízes, e avalie a veracidade das afirmativas a seguir
I - Para 6250<K<6750 o sistema apresentará respostas oscilatórias
II - para 6250<K<6750 o sistema terá três polos reais
III - O sistema terá polos complexos conjugados para K<6250 e K>6750
IV - Para que os pólos tenham parte real igual a -10, o valor de K será K=12500
V - O valor de K que torna o sistema instável é maior que 67000
Assinale a alternativa correta.
III, IV e V
II, III, IV
II, III, IV e V
II, IV e V
I, II, III e IV
Sobre sistemas de controle de malha aberta e de malha fechada, analise as afirmativas abaixo:
I. Nos sistemas de controle de malha fechada a saída é realimentada para ser comparada com entrada de referência, e gerar o sinal de erro;
II. Os sistemas de controle de malha aberta operam por base de tempo, e a saída depende de uma boa calibração dos componentes do sistema;
III. Sistemas de controle de malha aberta e de malha fechada possuem controladores, que executam programas para gerar as ações de controle sobre o processo.
Pode-se concluir que:
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
Na figura 1 é apresentado o gráfico do lugar das raízes de um sistema de controle, com realimentação unitária e controlador com parâmetro ajustável K.
Considerando a faixa de valores de K que torna o sistema oscilatório, o aumento do ganho do controlador pode provocar vários efeitos na resposta do sistema dentre eles:
I - Aumentar a frequência das oscilações
II - Aumentar o overshoot;
III - Melhorar a estabilidade do sistema
IV - Eliminar as oscilações
V - Reduzir o tempo de resposta transitória
Marque, dentre as alternativas a seguir, a que contém as afirmativas corretas.
II, III, IV e V
I, II, III e IV
I, II, III, IV e V
I, III, IV e V
III, IV e V
A Figura abaixo apresenta o gráfico do lugar das raízes para um sistema de malha fechada, com realimentação unitária, e controlador proporcional, com ganho ajustável K.
Analise as informações apresentadas no gráfico do lugar das raízes, e avalie a veracidade das afirmativas a seguir
I - Para 6250<K<6750 o sistema apresentará respostas oscilatórias
II - para 6250<K<6750 o sistema terá três polos reais
III - O sistema terá polos complexos conjugados para K<6250 e K>6750
IV - Para que os pólos tenham parte real igual a -10, o valor de K será K=12500
V - O valor de K que torna o sistema instável é maior que 67000
Assinale a alternativa correta.
III, IV e V
II, III, IV
II, III, IV e V
II, IV e V
I, II, III e IV
Sobre sistemas de controle de malha aberta e de malha fechada, analise as afirmativas abaixo:
I. Nos sistemas de controle de malha fechada a saída é realimentada para ser comparada com entrada de referência, e gerar o sinal de erro;
II. Os sistemas de controle de malha aberta operam por base de tempo, e a saída depende de uma boa calibração dos componentes do sistema;
III. Sistemas de controle de malha aberta e de malha fechada possuem controladores, que executam programas para gerar as ações de controle sobre o processo.
Pode-se concluir que:
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
II, III, IV e V
I, II, III e IV
I, II, III, IV e V
I, III, IV e V
III, IV e V
A Figura abaixo apresenta o gráfico do lugar das raízes para um sistema de malha fechada, com realimentação unitária, e controlador proporcional, com ganho ajustável K.
Analise as informações apresentadas no gráfico do lugar das raízes, e avalie a veracidade das afirmativas a seguir
I - Para 6250<K<6750 o sistema apresentará respostas oscilatórias
II - para 6250<K<6750 o sistema terá três polos reais
III - O sistema terá polos complexos conjugados para K<6250 e K>6750
IV - Para que os pólos tenham parte real igual a -10, o valor de K será K=12500
V - O valor de K que torna o sistema instável é maior que 67000
Assinale a alternativa correta.
III, IV e V
II, III, IV
II, III, IV e V
II, IV e V
I, II, III e IV
Sobre sistemas de controle de malha aberta e de malha fechada, analise as afirmativas abaixo:
I. Nos sistemas de controle de malha fechada a saída é realimentada para ser comparada com entrada de referência, e gerar o sinal de erro;
II. Os sistemas de controle de malha aberta operam por base de tempo, e a saída depende de uma boa calibração dos componentes do sistema;
III. Sistemas de controle de malha aberta e de malha fechada possuem controladores, que executam programas para gerar as ações de controle sobre o processo.
Pode-se concluir que:
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
III, IV e V
II, III, IV
II, III, IV e V
II, IV e V
I, II, III e IV
Sobre sistemas de controle de malha aberta e de malha fechada, analise as afirmativas abaixo:
I. Nos sistemas de controle de malha fechada a saída é realimentada para ser comparada com entrada de referência, e gerar o sinal de erro;
II. Os sistemas de controle de malha aberta operam por base de tempo, e a saída depende de uma boa calibração dos componentes do sistema;
III. Sistemas de controle de malha aberta e de malha fechada possuem controladores, que executam programas para gerar as ações de controle sobre o processo.
Pode-se concluir que:
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
As afirmativas I e II estão corretas e a afirmativa III está incorreta.
Todas as afirmativas estão corretas.
As afirmativas I e III estão corretas e a afirmativa II está incorreta.
As afirmativas II e III estão corretas e a afirmativa I está incorreta.
A afirmativa I está correta e as afirmativas II e III estão incorretas.
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - O controlador do sistema está representado pelos blocos subtrator e G1 associados em série.
II - O bloco G2 está representando a bóia, elemento de medição e realimentação do sistema de controle.
III - O bloco G4 representa o tanque, ou seja, o processo do qual se quer controlar a PV.
IV - O bloco G2 representa o elemento final de controle do sistema.
V - A motobomba, responsável por deslocar o fluido até o tanque, não está representado no diagrama de blocos.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
I, II, V
II, IV, V
I, III, IV
I, IV, V
I, III, V
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de posição do eixo de um motor dc, com ganho proporcional Kp, e seu gráfico do lugar das raízes
Apresenta ainda a resposta ao degrau unitário do sistema, para três valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - O aumento de Kp aumenta o amortecimento, podendo causar oscilação do eixo e aumento de overshoot
II - O aumento de Kp aumenta a frequência do sistema, fazendo o eixo oscilar em torno da posição de referência
III - A variação de Kp pode causar variações de posição do eixo com respostas sub, sobre e criticamente amortecidas
IV - O erro de posição do eixo, na resposta ao degrau em regime permanente é nulo, para qualquer valor de Kp
V - Da curva de resposta 1 para a 3, apresentadas no gráfico, o ganho Kp aumentou.
VI- Para que o eixo do motor estabilize na posição de referência mais rápido, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, a que contém as afirmativas corretas:
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.
I, II, III e IV
I, III, e IV
I, II, III, e V
II III, e V
II, III, IV e VI
A figura abaixo apresenta um sistema de primeira ordem, construído a partir de um amplificador operacional, sendo ei a tensão de entrada e eo a tensão de saída. No gráfico, são apresentadas três respostas ao degrau de amplitude -2.
Considere as afirmativas, quais são as verdadeiras:
I - A EDO que representa o sistema é: `
II - A função de transferência que representa o sistema é: `
III - Simulando o sistema os valores de R1=1 KΩ, R2=5 KΩ e C=200μF chega-se à resposta 1
IV - Para se chegar à resposta 2, é necessário utilizar R1=1 KΩ, R2=5 KΩ e C=100μF
V - Utilizando R1=1 KΩ, R2=5 KΩ e C=250μF chega-se à resposta 3.
Assinale a alternativa correta.