SISTEMAS DE CONTROLE I
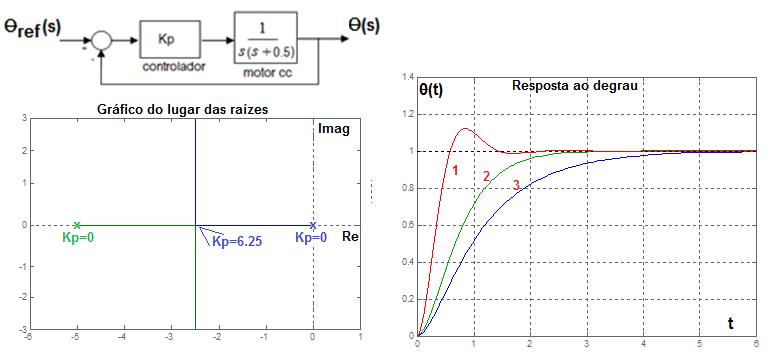
A figura abaixo mostra um servo-sistema posicionador de braço de robô, onde K é o ganho ajustável de um controlador, utilizado para realizar o controle posição do braço.

Ao lado da figura estão relacionadas 5 opções para cálculo de fator de amortecimento e frequência natural, em função do ganho do controlador K, enumeradas de I a V.
Nas alternativas a seguir, marque a que contém a opção correta?
IV
V
I
II
III
O amplificador operacional (AO) é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle. Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não existe diferença de potencial entre os mesmos (estão em "curto-circuito virtual").
No sistema esquematizado abaixo, empregando-se essas considerações, chega-se ao conjunto de equações necessárias para modelagem do circuito dado:

Considerando que a função de transferência do sistema Eo(s)/Ei(s), analise as afirmativas a seguir:
I - O sistema terá um zero em s = 0
II - O sistema terá um pólo em s = -1/(R1.C)
III - A função de transferência será do tipo K/(T.s+1) , onde K = (R1+R2)/R1 e T = R1.C
IV - O sistema é de primeira ordem.
V - A tensão de resposta ao degrau eo(t), em regime permanente, sempre será maior que a tensão de entrada ei(t), e ambas terão o mesmo sinal.
Estão corretas as afirmativas:
I, III, IV, V
II, III, IV, V
III, IV, V
II, III, IV
II, IV, V
Dado o sistema elétrico da figura abaixo, sendo Vi a tensão de entrada e Vo a tensão de saída; e um diagrama de blocos que deverá ser utilizado para representar o sistema, utilizando funções no domínio da frequência.
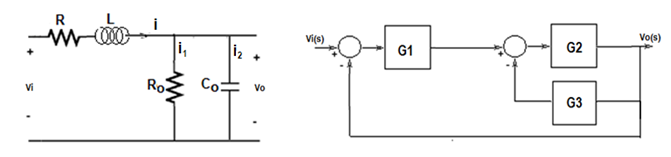
O diagrama de blocos representará corretamente o sistema elétrico se as funções G1, G2 e G3 forem iguais a:
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = Co.s G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = Co.s G3(s) = 1/Ro
O sistema elétrico apresentado na figura abaixo é utilizado como filtro em sistemas de recepção de sinais. Vi e Vo e os sinais de tensões na entrada e na saída do filtro, i é a corrente elétrica. R, L e C são, respectivamente elementos resistência, indutância e capacitância.

Considerando as equações (1) a (5), analise as afirmativas a seguir. .
I - A equação (1) é verdadeira, porém a (2) e (3) são falsas.
II - A equação (4) é verdadeira.
III - A equação (5) é verdadeira e representa a função de transferência do sistema.
IV - O filtro é um sistema de 3a. ordem, e portanto possui três pólos e um zero.
V - O ganho do sistema filtro é zero.
São corretas as afirmativas:
I, II, III, IV e V
II, IV e V
I, II, IV e V
I, II, V
I, III, IV e V
Apresenta-se a seguir uma tabela com pares de transformadas de Laplace de algumas funções.
Porém, em uma mesma linha, pode ser que f(t) não seja a transformada inversa de Laplace de F(s).
Na coluna A foi atribuída uma numeração das funções F(s).
Enumere a coluna B com o número da função F(s), de forma a haver a correta correspondência entre f(t) e F(s),
ou seja, que f(t) e F(s) correspondentes tenham a mesma numeração.

A coluna B, na forma transposta, terá a seguinte sequência numérica:
1 4 2 3 6 5 8 7 9
1 3 4 2 6 5 8 7 9
1 4 3 2 6 5 9 7 8
1 4 2 3 5 6 7 8 9
1 4 2 3 5 6 8 7 9
Um sistema de controle de posição de braço de robô tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saída: velocidade v(t) dada em metros por segundo, e o deslocamento y(t) dado em metros.
O comportamento dinâmico do sistema é dado pela equação diferencial:
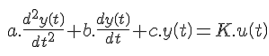
Sendo k=1, a=1, b=3 e c=2.
Considerando o sinal de excitação u(t) do tipo degrau unitário, encontre y(t) empregando transformadas de Laplace.
A resposta v(t), relativa à variação da velocidade do braço, será:
v(t)= e-t _ e-2t
v(t)= 1/2 - e-t + 1/2. e-2t
v(t)= e-t + e-2t
v(t)= e-2t _ e-3t
v(t)= 1/2 - e-t - 1/2. e-2t
Considere o lugar das raízes de um sistema de controle com realimentação unitária, e controlador com ganho variável G dado na figura abaixo.
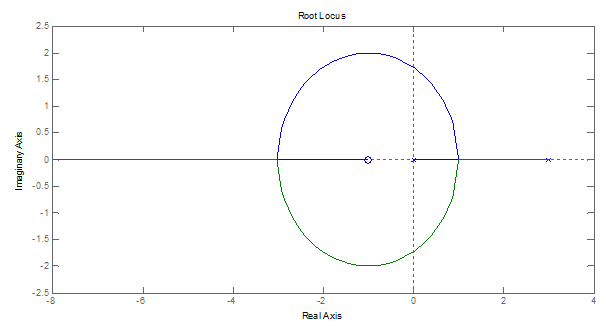
A partir da análise das informações contidas no gráfico, avalie a veracidade das afirmativas a seguir:
I - Para G<9 o sistema terá pólos reais e distintos
II - O sistema será instável para G<3
III - O valor aproximado de G que coloca o sistema no limite da estabilidade é G=3
IV - O valor de G que torna os pólos do sistema reais e iguais é G=9
V - Para 3<G<9 o sistema possuirá polos complexos conjugados
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.

Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
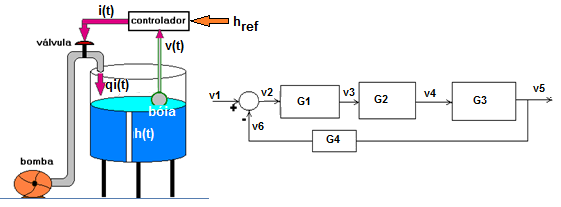
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
IV
V
I
II
III
O amplificador operacional (AO) é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle. Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não existe diferença de potencial entre os mesmos (estão em "curto-circuito virtual").
No sistema esquematizado abaixo, empregando-se essas considerações, chega-se ao conjunto de equações necessárias para modelagem do circuito dado:
Considerando que a função de transferência do sistema Eo(s)/Ei(s), analise as afirmativas a seguir:
I - O sistema terá um zero em s = 0
II - O sistema terá um pólo em s = -1/(R1.C)
III - A função de transferência será do tipo K/(T.s+1) , onde K = (R1+R2)/R1 e T = R1.C
IV - O sistema é de primeira ordem.
V - A tensão de resposta ao degrau eo(t), em regime permanente, sempre será maior que a tensão de entrada ei(t), e ambas terão o mesmo sinal.
Estão corretas as afirmativas:
I, III, IV, V
II, III, IV, V
III, IV, V
II, III, IV
II, IV, V
Dado o sistema elétrico da figura abaixo, sendo Vi a tensão de entrada e Vo a tensão de saída; e um diagrama de blocos que deverá ser utilizado para representar o sistema, utilizando funções no domínio da frequência.
O diagrama de blocos representará corretamente o sistema elétrico se as funções G1, G2 e G3 forem iguais a:
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = Co.s G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = Co.s G3(s) = 1/Ro
O sistema elétrico apresentado na figura abaixo é utilizado como filtro em sistemas de recepção de sinais. Vi e Vo e os sinais de tensões na entrada e na saída do filtro, i é a corrente elétrica. R, L e C são, respectivamente elementos resistência, indutância e capacitância.
Considerando as equações (1) a (5), analise as afirmativas a seguir. .
I - A equação (1) é verdadeira, porém a (2) e (3) são falsas.
II - A equação (4) é verdadeira.
III - A equação (5) é verdadeira e representa a função de transferência do sistema.
IV - O filtro é um sistema de 3a. ordem, e portanto possui três pólos e um zero.
V - O ganho do sistema filtro é zero.
São corretas as afirmativas:
I, II, III, IV e V
II, IV e V
I, II, IV e V
I, II, V
I, III, IV e V
Apresenta-se a seguir uma tabela com pares de transformadas de Laplace de algumas funções.
Porém, em uma mesma linha, pode ser que f(t) não seja a transformada inversa de Laplace de F(s).
Na coluna A foi atribuída uma numeração das funções F(s).
Enumere a coluna B com o número da função F(s), de forma a haver a correta correspondência entre f(t) e F(s),
ou seja, que f(t) e F(s) correspondentes tenham a mesma numeração.
A coluna B, na forma transposta, terá a seguinte sequência numérica:
1 4 2 3 6 5 8 7 9
1 3 4 2 6 5 8 7 9
1 4 3 2 6 5 9 7 8
1 4 2 3 5 6 7 8 9
1 4 2 3 5 6 8 7 9
Um sistema de controle de posição de braço de robô tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saída: velocidade v(t) dada em metros por segundo, e o deslocamento y(t) dado em metros.
O comportamento dinâmico do sistema é dado pela equação diferencial:
Sendo k=1, a=1, b=3 e c=2.
Considerando o sinal de excitação u(t) do tipo degrau unitário, encontre y(t) empregando transformadas de Laplace.
A resposta v(t), relativa à variação da velocidade do braço, será:
v(t)= e-t _ e-2t
v(t)= 1/2 - e-t + 1/2. e-2t
v(t)= e-t + e-2t
v(t)= e-2t _ e-3t
v(t)= 1/2 - e-t - 1/2. e-2t
Considere o lugar das raízes de um sistema de controle com realimentação unitária, e controlador com ganho variável G dado na figura abaixo.
A partir da análise das informações contidas no gráfico, avalie a veracidade das afirmativas a seguir:
I - Para G<9 o sistema terá pólos reais e distintos
II - O sistema será instável para G<3
III - O valor aproximado de G que coloca o sistema no limite da estabilidade é G=3
IV - O valor de G que torna os pólos do sistema reais e iguais é G=9
V - Para 3<G<9 o sistema possuirá polos complexos conjugados
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.
Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
Considerando que a função de transferência do sistema Eo(s)/Ei(s), analise as afirmativas a seguir:
I, III, IV, V
II, III, IV, V
III, IV, V
II, III, IV
II, IV, V
Dado o sistema elétrico da figura abaixo, sendo Vi a tensão de entrada e Vo a tensão de saída; e um diagrama de blocos que deverá ser utilizado para representar o sistema, utilizando funções no domínio da frequência.
O diagrama de blocos representará corretamente o sistema elétrico se as funções G1, G2 e G3 forem iguais a:
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = Co.s G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = Co.s G3(s) = 1/Ro
O sistema elétrico apresentado na figura abaixo é utilizado como filtro em sistemas de recepção de sinais. Vi e Vo e os sinais de tensões na entrada e na saída do filtro, i é a corrente elétrica. R, L e C são, respectivamente elementos resistência, indutância e capacitância.
Considerando as equações (1) a (5), analise as afirmativas a seguir. .
I - A equação (1) é verdadeira, porém a (2) e (3) são falsas.
II - A equação (4) é verdadeira.
III - A equação (5) é verdadeira e representa a função de transferência do sistema.
IV - O filtro é um sistema de 3a. ordem, e portanto possui três pólos e um zero.
V - O ganho do sistema filtro é zero.
São corretas as afirmativas:
I, II, III, IV e V
II, IV e V
I, II, IV e V
I, II, V
I, III, IV e V
Apresenta-se a seguir uma tabela com pares de transformadas de Laplace de algumas funções.
Porém, em uma mesma linha, pode ser que f(t) não seja a transformada inversa de Laplace de F(s).
Na coluna A foi atribuída uma numeração das funções F(s).
Enumere a coluna B com o número da função F(s), de forma a haver a correta correspondência entre f(t) e F(s),
ou seja, que f(t) e F(s) correspondentes tenham a mesma numeração.
A coluna B, na forma transposta, terá a seguinte sequência numérica:
1 4 2 3 6 5 8 7 9
1 3 4 2 6 5 8 7 9
1 4 3 2 6 5 9 7 8
1 4 2 3 5 6 7 8 9
1 4 2 3 5 6 8 7 9
Um sistema de controle de posição de braço de robô tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saída: velocidade v(t) dada em metros por segundo, e o deslocamento y(t) dado em metros.
O comportamento dinâmico do sistema é dado pela equação diferencial:
Sendo k=1, a=1, b=3 e c=2.
Considerando o sinal de excitação u(t) do tipo degrau unitário, encontre y(t) empregando transformadas de Laplace.
A resposta v(t), relativa à variação da velocidade do braço, será:
v(t)= e-t _ e-2t
v(t)= 1/2 - e-t + 1/2. e-2t
v(t)= e-t + e-2t
v(t)= e-2t _ e-3t
v(t)= 1/2 - e-t - 1/2. e-2t
Considere o lugar das raízes de um sistema de controle com realimentação unitária, e controlador com ganho variável G dado na figura abaixo.
A partir da análise das informações contidas no gráfico, avalie a veracidade das afirmativas a seguir:
I - Para G<9 o sistema terá pólos reais e distintos
II - O sistema será instável para G<3
III - O valor aproximado de G que coloca o sistema no limite da estabilidade é G=3
IV - O valor de G que torna os pólos do sistema reais e iguais é G=9
V - Para 3<G<9 o sistema possuirá polos complexos conjugados
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.
Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = Co.s G3(s) = 1/Ro
G1(s) = L.s+R G2(s) = 1/(Co.s) G3(s) = 1/Ro
G1(s) = 1/(L.s+R) G2(s) = Co.s G3(s) = 1/Ro
O sistema elétrico apresentado na figura abaixo é utilizado como filtro em sistemas de recepção de sinais. Vi e Vo e os sinais de tensões na entrada e na saída do filtro, i é a corrente elétrica. R, L e C são, respectivamente elementos resistência, indutância e capacitância.
Considerando as equações (1) a (5), analise as afirmativas a seguir. .
I - A equação (1) é verdadeira, porém a (2) e (3) são falsas.
II - A equação (4) é verdadeira.
III - A equação (5) é verdadeira e representa a função de transferência do sistema.
IV - O filtro é um sistema de 3a. ordem, e portanto possui três pólos e um zero.
V - O ganho do sistema filtro é zero.
São corretas as afirmativas:
I, II, III, IV e V
II, IV e V
I, II, IV e V
I, II, V
I, III, IV e V
Apresenta-se a seguir uma tabela com pares de transformadas de Laplace de algumas funções.
Porém, em uma mesma linha, pode ser que f(t) não seja a transformada inversa de Laplace de F(s).
Na coluna A foi atribuída uma numeração das funções F(s).
Enumere a coluna B com o número da função F(s), de forma a haver a correta correspondência entre f(t) e F(s),
ou seja, que f(t) e F(s) correspondentes tenham a mesma numeração.
A coluna B, na forma transposta, terá a seguinte sequência numérica:
1 4 2 3 6 5 8 7 9
1 3 4 2 6 5 8 7 9
1 4 3 2 6 5 9 7 8
1 4 2 3 5 6 7 8 9
1 4 2 3 5 6 8 7 9
Um sistema de controle de posição de braço de robô tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saída: velocidade v(t) dada em metros por segundo, e o deslocamento y(t) dado em metros.
O comportamento dinâmico do sistema é dado pela equação diferencial:
Sendo k=1, a=1, b=3 e c=2.
Considerando o sinal de excitação u(t) do tipo degrau unitário, encontre y(t) empregando transformadas de Laplace.
A resposta v(t), relativa à variação da velocidade do braço, será:
v(t)= e-t _ e-2t
v(t)= 1/2 - e-t + 1/2. e-2t
v(t)= e-t + e-2t
v(t)= e-2t _ e-3t
v(t)= 1/2 - e-t - 1/2. e-2t
Considere o lugar das raízes de um sistema de controle com realimentação unitária, e controlador com ganho variável G dado na figura abaixo.
A partir da análise das informações contidas no gráfico, avalie a veracidade das afirmativas a seguir:
I - Para G<9 o sistema terá pólos reais e distintos
II - O sistema será instável para G<3
III - O valor aproximado de G que coloca o sistema no limite da estabilidade é G=3
IV - O valor de G que torna os pólos do sistema reais e iguais é G=9
V - Para 3<G<9 o sistema possuirá polos complexos conjugados
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.
Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
I, II, III, IV e V
II, IV e V
I, II, IV e V
I, II, V
I, III, IV e V
Apresenta-se a seguir uma tabela com pares de transformadas de Laplace de algumas funções.
Porém, em uma mesma linha, pode ser que f(t) não seja a transformada inversa de Laplace de F(s).
Na coluna A foi atribuída uma numeração das funções F(s).
Enumere a coluna B com o número da função F(s), de forma a haver a correta correspondência entre f(t) e F(s),
ou seja, que f(t) e F(s) correspondentes tenham a mesma numeração.
A coluna B, na forma transposta, terá a seguinte sequência numérica:
1 4 2 3 6 5 8 7 9
1 3 4 2 6 5 8 7 9
1 4 3 2 6 5 9 7 8
1 4 2 3 5 6 7 8 9
1 4 2 3 5 6 8 7 9
Um sistema de controle de posição de braço de robô tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saída: velocidade v(t) dada em metros por segundo, e o deslocamento y(t) dado em metros.
O comportamento dinâmico do sistema é dado pela equação diferencial:
Sendo k=1, a=1, b=3 e c=2.
Considerando o sinal de excitação u(t) do tipo degrau unitário, encontre y(t) empregando transformadas de Laplace.
A resposta v(t), relativa à variação da velocidade do braço, será:
v(t)= e-t _ e-2t
v(t)= 1/2 - e-t + 1/2. e-2t
v(t)= e-t + e-2t
v(t)= e-2t _ e-3t
v(t)= 1/2 - e-t - 1/2. e-2t
Considere o lugar das raízes de um sistema de controle com realimentação unitária, e controlador com ganho variável G dado na figura abaixo.
A partir da análise das informações contidas no gráfico, avalie a veracidade das afirmativas a seguir:
I - Para G<9 o sistema terá pólos reais e distintos
II - O sistema será instável para G<3
III - O valor aproximado de G que coloca o sistema no limite da estabilidade é G=3
IV - O valor de G que torna os pólos do sistema reais e iguais é G=9
V - Para 3<G<9 o sistema possuirá polos complexos conjugados
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.
Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
1 4 2 3 6 5 8 7 9
1 3 4 2 6 5 8 7 9
1 4 3 2 6 5 9 7 8
1 4 2 3 5 6 7 8 9
1 4 2 3 5 6 8 7 9
Um sistema de controle de posição de braço de robô tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saída: velocidade v(t) dada em metros por segundo, e o deslocamento y(t) dado em metros.
O comportamento dinâmico do sistema é dado pela equação diferencial:
Sendo k=1, a=1, b=3 e c=2.
Considerando o sinal de excitação u(t) do tipo degrau unitário, encontre y(t) empregando transformadas de Laplace.
A resposta v(t), relativa à variação da velocidade do braço, será:
v(t)= e-t _ e-2t
v(t)= 1/2 - e-t + 1/2. e-2t
v(t)= e-t + e-2t
v(t)= e-2t _ e-3t
v(t)= 1/2 - e-t - 1/2. e-2t
Considere o lugar das raízes de um sistema de controle com realimentação unitária, e controlador com ganho variável G dado na figura abaixo.
A partir da análise das informações contidas no gráfico, avalie a veracidade das afirmativas a seguir:
I - Para G<9 o sistema terá pólos reais e distintos
II - O sistema será instável para G<3
III - O valor aproximado de G que coloca o sistema no limite da estabilidade é G=3
IV - O valor de G que torna os pólos do sistema reais e iguais é G=9
V - Para 3<G<9 o sistema possuirá polos complexos conjugados
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.
Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
v(t)= e-t _ e-2t
v(t)= 1/2 - e-t + 1/2. e-2t
v(t)= e-t + e-2t
v(t)= e-2t _ e-3t
v(t)= 1/2 - e-t - 1/2. e-2t
Considere o lugar das raízes de um sistema de controle com realimentação unitária, e controlador com ganho variável G dado na figura abaixo.
A partir da análise das informações contidas no gráfico, avalie a veracidade das afirmativas a seguir:
I - Para G<9 o sistema terá pólos reais e distintos
II - O sistema será instável para G<3
III - O valor aproximado de G que coloca o sistema no limite da estabilidade é G=3
IV - O valor de G que torna os pólos do sistema reais e iguais é G=9
V - Para 3<G<9 o sistema possuirá polos complexos conjugados
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.
Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
III, IV e V
II, III, IV e V
II, III e IV
I, II, III, IV e V
II, III e V
A figura abaixo apresenta o diagrama de um sistema de controle manual de um processo de aquecimento de água em um trocador de calor, usando vapor superaquecido como fonte de energia térmica.
Analise as afirmativas seguintes:
I - A variável de saída ou controlada do processo, é a vazão de água quente
II - A variável de entrada para o processo, ou variável manipulada, é a vazão de água fria
III - Para o controlador, o set-point é a temperatura desejada da água de saída do trocador de calor
IV - A vazão de vapor é a MV
V - A temperatura da água é a PV
Estão tecnicamente correta as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas:
I, II, III
III, IV, V
I, III, V
I, IV, V
II, IV, V
A figura abaixo apresenta o ícone de um sistema de controle de malha fechada, e sua representação por diagrama de blocos.
Trata-se do controle de nível h(t) em um tanque, que recebe uma vazão de entrada qi(t). Observe que a bóia transmite o nível medido até o controlador na forma tensão variável v(t), e o controlador aciona a válvula utilizando corrente elétrica i(t) para comandá-la. O controlador, além de v(t), recebe também o sinal de nível de referência href.
O diagrama de blocos procura representar todas as variáveis e funções de transferência dos elementos do sistema de controle.
Analise as informações contidas na figura, e avalie as afirmativas a seguir:
I - A variável v1 corresponde ao nível de referência, porém sua unidade de engenharia é o Volt.
II - A variável v2 é o erro do sistema, dado pela diferença entre o nível de referência e o nível medido, e todas podem ter metros (m) como unidade de engenharia.
III - A variável v3 é o sinal de corrente utilizado pelo controlador para manipular a válvula, e por consequência a vazão. Sua unidade é o Ampére
IV - v2 é a variável manipulada no sistema, e corresponde à vazão de entrada para o tanque. Sua unidade de engenharia pode ser litros/minuto.
V - A variável do processo (PV) é o nível acumulado no tanque, e corresponde a V5. Sua unidade poderia ser litros ou m3.
São verdadeiras as afirmativas: