SISTEMAS DE CONTROLE I
Um sistema de controle de posição de braço de robô tem como variável de entrada tensão u(t), dada em volts, e pode ter duas variáveis de saÃda: velocidade v(t) dada em metros por segundo, e o deslocamento y(t) dado em metros.Â
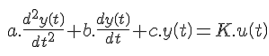
O comportamento dinâmico do sistema é dado pela equação diferencial: Â
Â
 Sendo k=1, a=1, b=3 e c=2.
Considerando o sinal de excitação u(t) do tipo degrau unitário, encontre y(t) empregando transformadas de Laplace.
A resposta v(t), relativa à variação da velocidade do braço, será: