SISTEMAS DE CONTROLE II
Um controlador de avanço de fase foi projetado em tempo contínuo, obtendo-se a seguinte função de transferência desse controlador: D(s) = s + 1 0 .1s + 1 Esse controlador foi utilizado em um sistema de controle digital, com um período de amostragem T = 0.1s, e a regra retangular de avanço (regra de Euler) para calcular o equivalente em tempo discreto de D(s), obtemos?
%7D%3D%5Cfrac%7B%7B%7Bz%7D%7D%7D%7B%7B%7Bz%7D-%7B0%7D%2C%7B9%7D%7D%7D "D(z)=(z)/(z-0,9)")
%7D%3D%5Cfrac%7B%7B%7Bz%7D-%7B0%7D%2C%7B9%7D%7D%7D%7B%7B%7B0%7D%2C%7B1%7D%7Bz%7D%7D%7D "D(z)=(z-0,9)/(0,1z)")
%7D%3D%5Cfrac%7B%7B%7B0%7D%2C%7B9%7D%7D%7D%7B%7B%7B0%7D%2C%7B1%7D%7Bz%7D-%7B1%7D%7D%7D "D(z)=(0,9)/(0,1z-1)")
%7D%3D%5Cfrac%7B%7B%7Bz%7D-%7B0%7D%2C%7B9%7D%7D%7D%7B%7B%7Bz%7D%7D%7D "D(z)=(z-0,9)/(z)")
%7D%3D%5Cfrac%7B%7B%7Bz%7D%7D%7D%7B%7B%7B0%7D%2C%7B1%7D%7D%7D "D(z)=(z)/(0,1)")
Marque a alternativa em são mostrados os tipos de representações no espaço de estados em formas canônicas?
Mensurável, Controlável e Localizável
Controlável, Observável e Diagonal (ou de Jordan)
Observável, Mensurável e Amigável
Mensurável, Amigável e Diagonal (ou de Jordan)
Localizável, Amigável e Mensurável
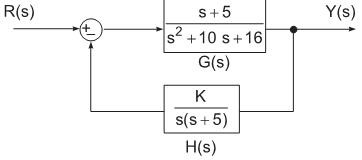 A figura acima mostra uma estrutura de controle em malha fechada, onde G(s) corresponde a uma planta que se deseja controlar com uma realimentação de saída através de um compensador H(s). Com base no diagrama, a função de transferência de malha fechada é:
A figura acima mostra uma estrutura de controle em malha fechada, onde G(s) corresponde a uma planta que se deseja controlar com uma realimentação de saída através de um compensador H(s). Com base no diagrama, a função de transferência de malha fechada é:
%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B3%7D%7D%2B%7B10%7D%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B16%7D%7Bs%7D%2B%7BK%7D%7D%7D "(K(s+5))/(s^3+10s^2+16s+K)")
%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B4%7D%7D%2B%7B15%7D%7B%7Bs%7D%7D%5E%7B%7B3%7D%7D%2B%7B66%7D%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B80%7D%7Bs%7D%7D%7D "(K(s+5))/(s^4+15s^3+66s^2 + 80s)")
%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B4%7D%7D%2B%7B15%7D%7B%7Bs%7D%7D%5E%7B%7B3%7D%7D%2B%7B66%7D%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B80%7D%7Bs%7D%2B%7BK%7D%7D%7D "(K(s+5))/(s^4+15s^3+66s^2+80s+K)")
/(s^4+15s^3+66s^2+80s)")
%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B3%7D%7D%2B%7B10%7D%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B16%7D%7Bs%7D%2B%7BK%7D%7D%7D "(s(s+5))/(s^3+10s^2+16s+K)")
Considere a seguinte função de transferência:
%7D%7D%7D%7B%7B%7BU%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7Bs%7D%2B%7B6%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B5%7D%7Bs%7D%2B%7B6%7D%7D%7D "(Y(s))/(U(s))=(s+6)/(s^2+5s+6)")
Qual a representação no espaço de estados desse sistema na forma canônica observavel.
],[x_(2)]]")
],[x_(2)]]")
],[x_(2)]]")
],[x_(2)]]")
],[x_(1)]]")
Um sistema é _____________ no intervalo [to, tf] se existir uma entrada contínua u(t) tal que qualquer estado inicial x(to) possa ser levado para qualquer estado arbitrário x(tf) em um intervalo de tempo finito tf – to > 0.
Complete a lacuna acima assinalando a alternativa correta.
Suportável
Não observável
Observável
Não controlável
Controlável
Os sistemas discretos de controle apresentam a propriedade de poder exibir uma resposta dead-beat. Essa propriedade não é observada nos sistemas _____________. Uma resposta dead-beat é aquela obtida quando o sinal de referência é atingido em um ___________ tempo com erro zero. Em contraste, um sistema __________ pode atingir o valor de referência, com erro zero, somente para tempo ___________ (matematicamente). Ou seja, a operação de amostragem dos sistemas discretos permite que eles atinjam um valor de regime em um tempo que transita no ____________.
Preencha as lacunas acima e marque a alternativa correspondente.
contínuos, mínimo, contínuo, infinito, infinito
intermitentes, máximo, inconstante, finito, finito
inconstantes, amplo, intermitente, determinado, determinado
descontínuos, máximo, contínuos, infinito, infinito
contínuos, enorme, descontínuo, finito, finito
Para o sistema mostrado abaixo, obtenha um algoritmo Dead-Beat.
G(s) = y(s)/u(s) = ZOH/(s + 1), para t = 0,1
%7D%3D%5Cfrac%7B%7B%7By%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%7B%7B%7Bu%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7B0%7D%2C%7B0952%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D%7B%7B%7B1%7D-%7B0%7D%2C%7B9048%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D "G(z)=(y(z))/(u(z))=(0,0952 z^-1)/(1-0,9048 z^-1)")
%7D%3D%5Cfrac%7B%7B%7Bu%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%7B%7B%7Be%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7B9%7D%2C%7B5052%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D-%7B10%7D%2C%7B5042%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B2%7D%7D%7D%7D%7D%7D%7B%7B%7B1%7D%2B%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D-%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B2%7D%7D%7D%7D%7D%7D "D(z)=(u(z))/(e(z))=(9,5052 z^-1 - 10,5042 z^-2)/(1+z^-1 - z^-2)")
%7D%3D%5Cfrac%7B%7B%7Bu%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%7B%7B%7Be%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7B10%7D%2C%7B5042%7D-%7B9%7D%2C%7B5042%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D%7B%7B%7B1%7D-%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D "D(z)=(u(z))/(e(z))=(10,5042-9,5042 z^-1)/(1-z^-1)")
%7D%3D%5Cfrac%7B%7B%7Bu%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%7B%7B%7Be%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7B10%7D%2C%7B5042%7D-%7B9%7D%2C%7B5042%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D%7B%7B%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D-%7B1%7D%7D%7D "D(z)=(u(z))/(e(z))=(10,5042-9,5042 z^-1)/(z^-1 - 1)")
%7D%3D%5Cfrac%7B%7B%7Bu%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%7B%7B%7Be%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7B9%7D%2C%7B5042%7D-%7B10%7D%2C%7B5042%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D%7B%7B%7B1%7D-%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D "D(z)=(u(z))/(e(z))=(9,5042-10,5042 z^-1)/(1-z^-1)")
%7D%3D%5Cfrac%7B%7B%7Bu%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%7B%7B%7Be%7D%7B%5Cleft(%7Bz%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7B9%7D%2C%7B5042%7D-%7B10%7D%2C%7B5042%7D%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D%7D%7D%7B%7B%7B%7Bz%7D%7D%5E%7B%7B-%7B%7B1%7D%7D%7D%7D-%7B1%7D%7D%7D "D(z)=(u(z))/(e(z))=(9,5042-10,5042 z^-1)/(z^-1 - 1)")
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
%7D%7D%7D%7B%7B%7BU%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7Bs%7D%2B%7B3%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B3%7D%7Bs%7D%2B%7B2%7D%7D%7D "(Y(s))/(U(s))=(s+3)/(s^2+3s+2)")
Obtenha a representação no espaço de estados na forma canônica observável.
Marque a alternativa em são mostrados os tipos de representações no espaço de estados em formas canônicas?
Mensurável, Controlável e Localizável
Controlável, Observável e Diagonal (ou de Jordan)
Observável, Mensurável e Amigável
Mensurável, Amigável e Diagonal (ou de Jordan)
Localizável, Amigável e Mensurável
A figura acima mostra uma estrutura de controle em malha fechada, onde G(s) corresponde a uma planta que se deseja controlar com uma realimentação de saída através de um compensador H(s). Com base no diagrama, a função de transferência de malha fechada é:
Considere a seguinte função de transferência:
Qual a representação no espaço de estados desse sistema na forma canônica observavel.
Um sistema é _____________ no intervalo [to, tf] se existir uma entrada contínua u(t) tal que qualquer estado inicial x(to) possa ser levado para qualquer estado arbitrário x(tf) em um intervalo de tempo finito tf – to > 0.
Complete a lacuna acima assinalando a alternativa correta.
Suportável
Não observável
Observável
Não controlável
Controlável
Os sistemas discretos de controle apresentam a propriedade de poder exibir uma resposta dead-beat. Essa propriedade não é observada nos sistemas _____________. Uma resposta dead-beat é aquela obtida quando o sinal de referência é atingido em um ___________ tempo com erro zero. Em contraste, um sistema __________ pode atingir o valor de referência, com erro zero, somente para tempo ___________ (matematicamente). Ou seja, a operação de amostragem dos sistemas discretos permite que eles atinjam um valor de regime em um tempo que transita no ____________.
Preencha as lacunas acima e marque a alternativa correspondente.
contínuos, mínimo, contínuo, infinito, infinito
intermitentes, máximo, inconstante, finito, finito
inconstantes, amplo, intermitente, determinado, determinado
descontínuos, máximo, contínuos, infinito, infinito
contínuos, enorme, descontínuo, finito, finito
Para o sistema mostrado abaixo, obtenha um algoritmo Dead-Beat.
G(s) = y(s)/u(s) = ZOH/(s + 1), para t = 0,1
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
Obtenha a representação no espaço de estados na forma canônica observável.
Mensurável, Controlável e Localizável
Controlável, Observável e Diagonal (ou de Jordan)
Observável, Mensurável e Amigável
Mensurável, Amigável e Diagonal (ou de Jordan)
Localizável, Amigável e Mensurável
A figura acima mostra uma estrutura de controle em malha fechada, onde G(s) corresponde a uma planta que se deseja controlar com uma realimentação de saída através de um compensador H(s). Com base no diagrama, a função de transferência de malha fechada é:
Considere a seguinte função de transferência:
Qual a representação no espaço de estados desse sistema na forma canônica observavel.
Um sistema é _____________ no intervalo [to, tf] se existir uma entrada contínua u(t) tal que qualquer estado inicial x(to) possa ser levado para qualquer estado arbitrário x(tf) em um intervalo de tempo finito tf – to > 0.
Complete a lacuna acima assinalando a alternativa correta.
Suportável
Não observável
Observável
Não controlável
Controlável
Os sistemas discretos de controle apresentam a propriedade de poder exibir uma resposta dead-beat. Essa propriedade não é observada nos sistemas _____________. Uma resposta dead-beat é aquela obtida quando o sinal de referência é atingido em um ___________ tempo com erro zero. Em contraste, um sistema __________ pode atingir o valor de referência, com erro zero, somente para tempo ___________ (matematicamente). Ou seja, a operação de amostragem dos sistemas discretos permite que eles atinjam um valor de regime em um tempo que transita no ____________.
Preencha as lacunas acima e marque a alternativa correspondente.
contínuos, mínimo, contínuo, infinito, infinito
intermitentes, máximo, inconstante, finito, finito
inconstantes, amplo, intermitente, determinado, determinado
descontínuos, máximo, contínuos, infinito, infinito
contínuos, enorme, descontínuo, finito, finito
Para o sistema mostrado abaixo, obtenha um algoritmo Dead-Beat.
G(s) = y(s)/u(s) = ZOH/(s + 1), para t = 0,1
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
Obtenha a representação no espaço de estados na forma canônica observável.
Considere a seguinte função de transferência:
Qual a representação no espaço de estados desse sistema na forma canônica observavel.
Um sistema é _____________ no intervalo [to, tf] se existir uma entrada contínua u(t) tal que qualquer estado inicial x(to) possa ser levado para qualquer estado arbitrário x(tf) em um intervalo de tempo finito tf – to > 0.
Complete a lacuna acima assinalando a alternativa correta.
Suportável
Não observável
Observável
Não controlável
Controlável
Os sistemas discretos de controle apresentam a propriedade de poder exibir uma resposta dead-beat. Essa propriedade não é observada nos sistemas _____________. Uma resposta dead-beat é aquela obtida quando o sinal de referência é atingido em um ___________ tempo com erro zero. Em contraste, um sistema __________ pode atingir o valor de referência, com erro zero, somente para tempo ___________ (matematicamente). Ou seja, a operação de amostragem dos sistemas discretos permite que eles atinjam um valor de regime em um tempo que transita no ____________.
Preencha as lacunas acima e marque a alternativa correspondente.
contínuos, mínimo, contínuo, infinito, infinito
intermitentes, máximo, inconstante, finito, finito
inconstantes, amplo, intermitente, determinado, determinado
descontínuos, máximo, contínuos, infinito, infinito
contínuos, enorme, descontínuo, finito, finito
Para o sistema mostrado abaixo, obtenha um algoritmo Dead-Beat.
G(s) = y(s)/u(s) = ZOH/(s + 1), para t = 0,1
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
Obtenha a representação no espaço de estados na forma canônica observável.
Um sistema é _____________ no intervalo [to, tf] se existir uma entrada contínua u(t) tal que qualquer estado inicial x(to) possa ser levado para qualquer estado arbitrário x(tf) em um intervalo de tempo finito tf – to > 0.
Complete a lacuna acima assinalando a alternativa correta.
Suportável
Não observável
Observável
Não controlável
Controlável
Os sistemas discretos de controle apresentam a propriedade de poder exibir uma resposta dead-beat. Essa propriedade não é observada nos sistemas _____________. Uma resposta dead-beat é aquela obtida quando o sinal de referência é atingido em um ___________ tempo com erro zero. Em contraste, um sistema __________ pode atingir o valor de referência, com erro zero, somente para tempo ___________ (matematicamente). Ou seja, a operação de amostragem dos sistemas discretos permite que eles atinjam um valor de regime em um tempo que transita no ____________.
Preencha as lacunas acima e marque a alternativa correspondente.
contínuos, mínimo, contínuo, infinito, infinito
intermitentes, máximo, inconstante, finito, finito
inconstantes, amplo, intermitente, determinado, determinado
descontínuos, máximo, contínuos, infinito, infinito
contínuos, enorme, descontínuo, finito, finito
Para o sistema mostrado abaixo, obtenha um algoritmo Dead-Beat.
G(s) = y(s)/u(s) = ZOH/(s + 1), para t = 0,1
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
Obtenha a representação no espaço de estados na forma canônica observável.
Suportável
Não observável
Observável
Não controlável
Controlável
Os sistemas discretos de controle apresentam a propriedade de poder exibir uma resposta dead-beat. Essa propriedade não é observada nos sistemas _____________. Uma resposta dead-beat é aquela obtida quando o sinal de referência é atingido em um ___________ tempo com erro zero. Em contraste, um sistema __________ pode atingir o valor de referência, com erro zero, somente para tempo ___________ (matematicamente). Ou seja, a operação de amostragem dos sistemas discretos permite que eles atinjam um valor de regime em um tempo que transita no ____________.
Preencha as lacunas acima e marque a alternativa correspondente.
contínuos, mínimo, contínuo, infinito, infinito
intermitentes, máximo, inconstante, finito, finito
inconstantes, amplo, intermitente, determinado, determinado
descontínuos, máximo, contínuos, infinito, infinito
contínuos, enorme, descontínuo, finito, finito
Para o sistema mostrado abaixo, obtenha um algoritmo Dead-Beat.
G(s) = y(s)/u(s) = ZOH/(s + 1), para t = 0,1
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
Obtenha a representação no espaço de estados na forma canônica observável.
contínuos, mínimo, contínuo, infinito, infinito
intermitentes, máximo, inconstante, finito, finito
inconstantes, amplo, intermitente, determinado, determinado
descontínuos, máximo, contínuos, infinito, infinito
contínuos, enorme, descontínuo, finito, finito
Para o sistema mostrado abaixo, obtenha um algoritmo Dead-Beat.
G(s) = y(s)/u(s) = ZOH/(s + 1), para t = 0,1
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
Obtenha a representação no espaço de estados na forma canônica observável.
Aplicando uma realimentação de estado, com a lei de controle dada por t(t)= -KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é:
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]
Considere o sistema dado por:
Obtenha a representação no espaço de estados na forma canônica observável.
[2 3]
[5 6]
[-2 -3]
[6 5]
[-5 -6]