SISTEMAS DE CONTROLE II
Qual equação abaixo define o método de Euler?
%7D-%7BX%7D%7B%5Cleft(%7Bk%7D%7BT%7D%5Cright)%7D%7D%7D%7B%7B%7BT%7D%7D%7D "Xcong(X(kT+1)-X(kT))/(T)")
%7D-%7BX%7D%7B%5Cleft(%7Bk%7D%7BT%7D-%7B1%7D%5Cright)%7D%7D%7D%7B%7B%7BT%7D%7D%7D "Xcong(X(kT+1)-X(kT-1))/(T)")
%7D-%7BX%7D%7B%5Cleft(%7BT%7D%5Cright)%7D%7D%7D%7B%7B%7BX%7D%7B%5Cleft(%7BT%7D%5Cright)%7D%7D%7D "Xcong(X(kT+1)-X(T))/(X(T))")
%7D-%7BX%7D%7B%5Cleft(%7BT%7D%5Cright)%7D%7D%7D%7B%7B%7BX%7D%7B%5Cleft(%7Bk%7D%7BT%7D%5Cright)%7D%7D%7D "Xcong(X(kT+1)-X(T))/(X(kT))")
%7D-%7BX%7D%7B%5Cleft(%7Bk%7D%7BT%7D%5Cright)%7D%7D%7D%7B%7B%7Bk%7D%7BT%7D%7D%7D "Xcong(X(T+1)-X(kT))/(kT)")
Leia as afirmações abaixo:
I. Equações de saída expressam as variáveis de saída como combinações lineares das variáveis de estado e das entradas.
II. A equação x = Ax + Bu é a equação de estado e o vetor x, vetor de estado.
III. Para a alocação de polos ser viável, os sistemas precisam ser controláveis.
IV. Se a matriz de sistema for diagonal, como na forma paralela, conseguimos verificar se o sistema é ou não controlável.
Das afirmativas qual(is) estão corretas?
Apenas I e IV
Apenas I
Apenas III
Apenas II e III
I, II, III e IV.
Considere os sistemas (1) e (2) apresentados a seguir.
],[dotx_(2)]]=[[1,1],[0,-1]][[x_(1)],[x_(2)]]+[[1],[0]]u") (1)
(1)
],[dotx_(2)]]=[[1,1],[2,-1]][[x_(1)],[x_(2)]]+[[1],[0]]u") (2)
(2)
Em relação ao sistema acima, assinale a opção correta.
O sistema (1) é de estados completamente controláveis e o sistema (2) não é de estados completamente controláveis.
Os sistemas (1) e (2) não são de estados completamente controláveis.
A matriz de controlabilidade do sistema (1) é não singular.
Os sistemas (1) e (2) são de estados completamente controláveis.
O sistema (1) não é de estados completamente controláveis e o sistema (2) é de estados completamente controláveis.
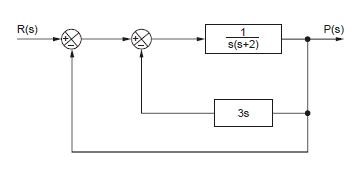
A função de transferência F(s) = P(s)/R(s) do sistema de controle abaixo é dada por:
/(s+2)")
/(s^2+5s+1)")
%7D%7D%7D-%7B3%7D%7Bs%7D "(1)/(s(s+2))-3s")
/(s^2+5s+1)")
/(3s^2+2s-1)")
Um sinal modulado, cuja frequência central de portadora é de 10 kHz, ocupa uma banda de frequências igual, também, a 10 kHz. Deseja-se converter o sinal para a forma discreta no tempo por meio de um processo de amostragem, de modo que a reconstrução do sinal original seja possível. Qual é a menor taxa de amostragem, expressa em amostras por segundo, que pode ser empregada?
10.000
30.000
15.000
20.000
40.000
Considere o sistema dado por:
%7D%7D%7D%7B%7B%7BU%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7Bs%7D%2B%7B3%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B3%7D%7Bs%7D%2B%7B2%7D%7D%7D "(Y(s))/(U(s))=(s+3)/(s^2+3s+2)")
Assinale a alternativa que representa no espaço de estados a forma canônica controlável.
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B-%7B2%7D%26-%7B3%7D%5C%5C%7B0%7D%26%7B1%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B2%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[-2,-3],[0,1]][[x_(1)(t)],[x_2(t)]]+[[0],[1]]u(t)")
%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B1%7D%26%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D "y(t)=[[1,3]][[x_(1)(t)],[x_(2)(t)]]")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26-%7B1%7D%5C%5C-%7B2%7D%26-%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B1%7D%5C%5C%7B0%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[0,-1],[-2,-3]][[x_(1)(t)],[x_(2)(t)]]+[[1],[0]]u(t)")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B-%7B2%7D%26%7B1%7D%5C%5C-%7B1%7D%26-%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B1%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[-2,1],[-1,-3]][[x_(1)(t)],[x_(2)(t)]]+[[1],[1]]u(t)")
%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B3%7D%26%7B1%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D "y(t)=[[3,1]][[x_(1)(t)],[x_(2)(t)]]")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26%7B1%7D%5C%5C-%7B2%7D%26-%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[0,1],[-2,-3]][[x_(1)(t)],[x_(2)(t)]]+[[0],[1]]u(t)")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26%7B1%7D%5C%5C-%7B3%7D%26-%7B2%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[0,1],[-3,-2]][[x_(1)(t)],[x_(2)(t)]]+[[0],[1]]u(t)")
O controlador dead-beat é aquele em que:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
],[dotx_(2)],[dotx_(3)]]=[[0,1,0],[0,0,1],[-1,-5,-6]][[x_(1)],[x_(2)],[x_(3)]]+[[0],[0],[1]]u")
%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B1%7D%26%7B0%7D%26%7B0%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%5C%5C%7Bx%7D_%7B%7B%7B3%7D%7D%7D%7D%5Cright%5D%7D "y(t)=[[1,0,0]][[x_(1)],[x_(2)],[x_(3)]]")
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.





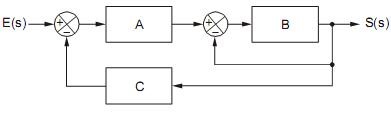
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
Leia as afirmações abaixo:
I. Equações de saída expressam as variáveis de saída como combinações lineares das variáveis de estado e das entradas.
II. A equação x = Ax + Bu é a equação de estado e o vetor x, vetor de estado.
III. Para a alocação de polos ser viável, os sistemas precisam ser controláveis.
IV. Se a matriz de sistema for diagonal, como na forma paralela, conseguimos verificar se o sistema é ou não controlável.
Das afirmativas qual(is) estão corretas?
Apenas I e IV
Apenas I
Apenas III
Apenas II e III
I, II, III e IV.
Considere os sistemas (1) e (2) apresentados a seguir.
(1)
(2)
Em relação ao sistema acima, assinale a opção correta.
O sistema (1) é de estados completamente controláveis e o sistema (2) não é de estados completamente controláveis.
Os sistemas (1) e (2) não são de estados completamente controláveis.
A matriz de controlabilidade do sistema (1) é não singular.
Os sistemas (1) e (2) são de estados completamente controláveis.
O sistema (1) não é de estados completamente controláveis e o sistema (2) é de estados completamente controláveis.
A função de transferência F(s) = P(s)/R(s) do sistema de controle abaixo é dada por:
Um sinal modulado, cuja frequência central de portadora é de 10 kHz, ocupa uma banda de frequências igual, também, a 10 kHz. Deseja-se converter o sinal para a forma discreta no tempo por meio de um processo de amostragem, de modo que a reconstrução do sinal original seja possível. Qual é a menor taxa de amostragem, expressa em amostras por segundo, que pode ser empregada?
10.000
30.000
15.000
20.000
40.000
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica controlável.
O controlador dead-beat é aquele em que:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
Apenas I e IV
Apenas I
Apenas III
Apenas II e III
I, II, III e IV.
Considere os sistemas (1) e (2) apresentados a seguir.
(1)
(2)
Em relação ao sistema acima, assinale a opção correta.
O sistema (1) é de estados completamente controláveis e o sistema (2) não é de estados completamente controláveis.
Os sistemas (1) e (2) não são de estados completamente controláveis.
A matriz de controlabilidade do sistema (1) é não singular.
Os sistemas (1) e (2) são de estados completamente controláveis.
O sistema (1) não é de estados completamente controláveis e o sistema (2) é de estados completamente controláveis.
A função de transferência F(s) = P(s)/R(s) do sistema de controle abaixo é dada por:
Um sinal modulado, cuja frequência central de portadora é de 10 kHz, ocupa uma banda de frequências igual, também, a 10 kHz. Deseja-se converter o sinal para a forma discreta no tempo por meio de um processo de amostragem, de modo que a reconstrução do sinal original seja possível. Qual é a menor taxa de amostragem, expressa em amostras por segundo, que pode ser empregada?
10.000
30.000
15.000
20.000
40.000
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica controlável.
O controlador dead-beat é aquele em que:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
O sistema (1) é de estados completamente controláveis e o sistema (2) não é de estados completamente controláveis.
Os sistemas (1) e (2) não são de estados completamente controláveis.
A matriz de controlabilidade do sistema (1) é não singular.
Os sistemas (1) e (2) são de estados completamente controláveis.
O sistema (1) não é de estados completamente controláveis e o sistema (2) é de estados completamente controláveis.
A função de transferência F(s) = P(s)/R(s) do sistema de controle abaixo é dada por:
Um sinal modulado, cuja frequência central de portadora é de 10 kHz, ocupa uma banda de frequências igual, também, a 10 kHz. Deseja-se converter o sinal para a forma discreta no tempo por meio de um processo de amostragem, de modo que a reconstrução do sinal original seja possível. Qual é a menor taxa de amostragem, expressa em amostras por segundo, que pode ser empregada?
10.000
30.000
15.000
20.000
40.000
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica controlável.
O controlador dead-beat é aquele em que:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
Um sinal modulado, cuja frequência central de portadora é de 10 kHz, ocupa uma banda de frequências igual, também, a 10 kHz. Deseja-se converter o sinal para a forma discreta no tempo por meio de um processo de amostragem, de modo que a reconstrução do sinal original seja possível. Qual é a menor taxa de amostragem, expressa em amostras por segundo, que pode ser empregada?
10.000
30.000
15.000
20.000
40.000
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica controlável.
O controlador dead-beat é aquele em que:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
10.000
30.000
15.000
20.000
40.000
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica controlável.
O controlador dead-beat é aquele em que:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
O controlador dead-beat é aquele em que:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
O tempo de subida deve ser mínimo e o erro de regime deve ser máximo.
O tempo de subida deve ser mínimo e o erro de regime deve ser zero.
O tempo de subida deve ser máximo e o erro de regime deve ser zero.
O tempo de subida deve ser mínimo e o erro de regime deve ser diferente de zero.
O tempo de subida deve ser máximo e o erro de regime deve ser diferente de zero.
Considere o sistema descrito por:
O sistema utiliza controle por realimentação de estado u(t) = -Kx(t). Deseja-se que os polos de malha fechada estejam em s1 = −2 + j84, s2 = −2 – j84 e s3 = −10. Determine a matriz de ganho K de realimentação de estado.
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por:
No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por: