SISTEMAS DE CONTROLE I
A figura abaixo mostra o diagrama de blocos de um servo-sistema posicionador de braço de robô.
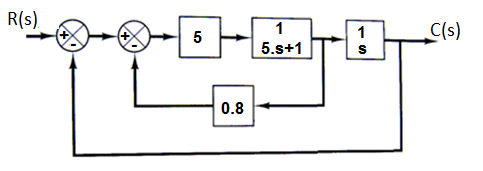
Tendo como referência a função de transferência C(s)/R(s), analise as afirmativas abaixo.
I - O ganho do servo-sistema é 10.
II - Os pólos do sistema são -0.5 + j0.87 e -0.5 - j0.87.
III - O sistema tem apenas um zero, de valor -1.
IV -O servosistema tem função de transferência de 2ª ordem.
V - O numerador da função de transferência é dado pelo polinômio (s+1).
VI - O denominador da função de transferência do servosistema é s2+s+1
VII - Se for aplicado um degrau unitário na entrada, a posição final da saída do servosistema tenderá a 1.
Assinale a alternativa correta.