O diagrama da figura abaixo apresenta um sistema com dois integradores ideais, sendo os blocos com as grandezas a1, a2 e b, amplificadores com ganhos constantes.
Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que é o vetor de estados. A matriz da dinâmica A e o vetor de saída C, da representação em espaço de estado deste sistema, respectivamente, são:
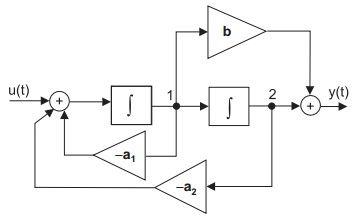 Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que
Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que