SISTEMAS DE CONTROLE I
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
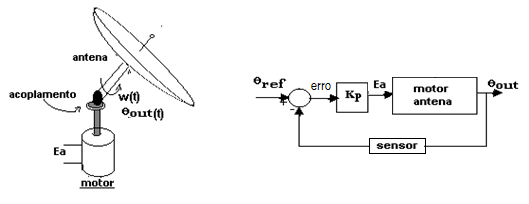
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas: