SISTEMAS DIGITAIS MICROCONTROLADOS
Sobre as memórias encontradas nos microcontroladores, analise as sentenças abaixo:
I - Todos os dispositivos de memória armazenam níveis lógicos binários (0s e 1s) em uma estrutura na forma de vetor. O tamanho de cada palavra binária (número de bits) armazenada varia dependendo da quantidade de dispositivos entrada ou saída.
II - Memória de acesso aleatório (RAM) é um termo genérico dado aos dispositivos que podem ter dados não voláteis que são facilmente escritos e lidos.
III - Os dados permanecem em um dispositivo RAM apenas enquanto a alimentação é aplicada.
IV - A memória de apena leitura (ROMs) tem seus dados gravados uma única vez e, a partir disso, seu conteúdo não muda.
É CORRETO apenas o que se afirma em:
Apenas as sentenças I e III são verdadeiras.
Apenas a sentença III é verdadeira.
Apenas as sentenças III e IV são verdadeiras.
Apenas as sentenças I e II são verdadeiras.
Apenas as sentenças II e III são verdadeiras.
O conversor analógico digital do microcontrolador PIC16F87X trabalha com resolução de 8 ou 10 bits, para uma faixa padrão de tensão de entrada analógica de X a Y, onde X é a tensão VSS, a alimentação negativa e Y é a tensão VDD, alimentação positiva. Porém, é possível alterar os valores de X e Y através de duas entradas de referência, -VREF (tensão de referência negativa) e +VREF (tensão de referência positiva). Num circuito, usando o PIC16F87X, tem-se o valor 116 ao ler uma entrada analógica. Assinale abaixo a alternativa que indica a tensão aproximada de entrada sabendo que X = +1 V e Y = + 4 V, e a resolução do conversor é de 8 bits.
2.36 V
1.36 V
3.18 V
2.00 V
1.00 V
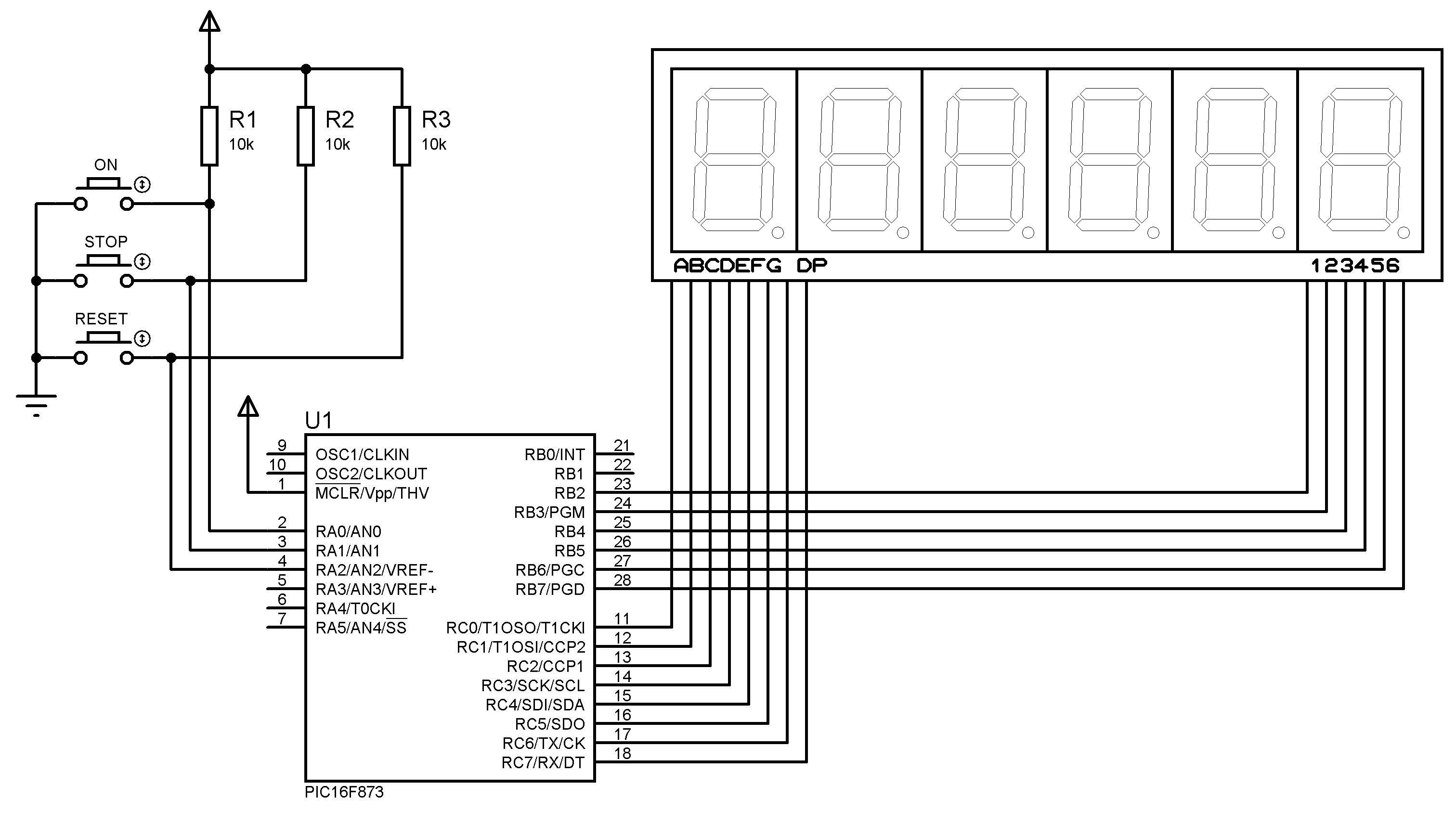
Observe o circuito e o código-fonte abaixo:
//==================== Arquivo crono.h //===================
#include
#device adc=8
#FUSES NOWDT
#FUSES XT
#FUSES PUT
#FUSES NOPROTECT
#FUSES BROWNOUT
#FUSES NOLVP
#FUSES NOCPD
#FUSES NOWRT
#FUSES NODEBUG
#use delay(clock=4000000)
#define BOTAO1 PIN_A0
#define BOTAO2 PIN_A1
#define BOTAO3 PIN_A2
//================== Fim Arquivo crono.h //=================
//==================== Arquivo crono.c //===================
#include "crono.h"
short contando, contar;
int numeros[6] = {0,0,0,0,0,0};
int n = 0;
int c, t;
int passo = 10;
BYTE CONST CODIGO [10]= {0x3F,0X06,0X5B,0X4F,0X66,0X6D,0X7D,0X07,0X7F,0X6F};
#int_RTCC
void RTCC_isr(void)
{
set_timer0(get_timer0() + 6);
if (contando)
{
passo--;
if (passo == 0)
{
passo = 10;
t = 0;
contar = 1;
while (contar)
{
if (numeros[t] < 9)
{
numeros[t]++;
contar = 0;
}
else
{
numeros[t] = 0;
t++;
}
}
}
}
output_b(0b11111111);
if (n == 2)
output_c(CODIGO[numeros[n]] | 128);
else
output_c(CODIGO[numeros[n]]);
output_b(0b11111111 ^ (128 >> n));
n++;
if (n > 5) n = 0;
}
void main()
{
setup_adc_ports(NO_ANALOGS);
setup_adc(ADC_CLOCK_DIV_2);
setup_spi(SPI_SS_DISABLED);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_4);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DISABLED,0,1);
setup_ccp1(CCP_OFF);
enable_interrupts(INT_RTCC);
enable_interrupts(GLOBAL);
contando = 0;
while(1)
{
if (contando)
{
if (!input(BOTAO2))
{
contando = 0;
}
}
else
{
if (!input(BOTAO1))
contando = 1;
if (!input(BOTAO3))
{
for (c = 0; c < 6; c++)
numeros[c] = 0;
passo = 10;
}
}
}
}
//================== Fim Arquivo crono.c //=================
Assinale a alternativa CORRETA em função do funcionamento e operação do cronômetro:
Ao iniciar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, todos os botões “ON”, “OFF” e “RESET” são lidos sequencialmente e cada um deles tem uma função específica. O botão “ON” congela o display mais a contagem continua, o botão “OFF” para a contagem e o botão “RESET” zera o contador.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e é reconhecido em qualquer momento da operação.
Os microcontroladores da família STM32 possuem três modos de operação, assinale a alternativa que aponta esses três modos:
Principal / Normal / queda de energia.
Principal / baixo consumo / queda de energia.
Normal / baixo consumo / sleep.
Alto desempenho / normal / economia de energia.
Alto desempenho / principal / sleep.
Leia atentamente as sentenças abaixo referente ao protocolo de comunicação CAN:
I - Foi criado para ser utilizado em ambientes isolados, sem índice de ruídos e interferências, em sistemas que necessitem de transmissão de mensagens sem prioridade e não havendo a necessidade de serem enviadas em tempo real.
II - Para se fazer a comunicação dos equipamentos, torna-se necessário apenas dois pares de fios, nomeados de CANH (High), CANL (Low), CANC (Clock) e CANG (Ground). A alimentação dos dispositivos é fornecida juntamente com os cabos de dados.
III - No caso de um microcontrolador PIC não possuir um controlador CAN embutido, será necessário utilizar um transceiver, por exemplo, o MCP2551, da própria Microchip.
IV - O protocolo CAN é indicado para operar em ambientes externos, interligando equipamentos a longas distâncias.
É CORRETO apenas o que se afirma em:
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença I é verdadeira.
Apenas a sentença III é falsa.
Apenas a sentença IV é verdadeira.
Apenas a sentença IV é falsa.
O oscilador eletrônico dita o ritmo do sistema, produzindo um sinal repetitivo. Esse sinal é elétrico e pode ser dito pulsante, seus níveis de tensão variam em alto e baixo (sinal digital). Essa troca constante de sinal é conhecida como clock, resultando em uma onda quadrada. Dentre os osciladores abaixo, assinale a alternativa que contém o oscilador que produz uma senoide de amplitude e frequência constante, cuja frequência é ajustada variando os valores da indutância ou da capacitância, seguindo a fórmula: 
Oscilador Pierce
Oscilador de cristal de quartzo
Oscilador Clapp
Oscilador Colpitts
Oscilador Hartley
_________ é um contador _________ da rotina da lógica. O valor é incrementado e caso a contagem __________, o microcontrolador entende como algum problema e reinicia automaticamente.
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
Apenas as sentenças I e III são verdadeiras.
Apenas a sentença III é verdadeira.
Apenas as sentenças III e IV são verdadeiras.
Apenas as sentenças I e II são verdadeiras.
Apenas as sentenças II e III são verdadeiras.
O conversor analógico digital do microcontrolador PIC16F87X trabalha com resolução de 8 ou 10 bits, para uma faixa padrão de tensão de entrada analógica de X a Y, onde X é a tensão VSS, a alimentação negativa e Y é a tensão VDD, alimentação positiva. Porém, é possível alterar os valores de X e Y através de duas entradas de referência, -VREF (tensão de referência negativa) e +VREF (tensão de referência positiva). Num circuito, usando o PIC16F87X, tem-se o valor 116 ao ler uma entrada analógica. Assinale abaixo a alternativa que indica a tensão aproximada de entrada sabendo que X = +1 V e Y = + 4 V, e a resolução do conversor é de 8 bits.
2.36 V
1.36 V
3.18 V
2.00 V
1.00 V
Observe o circuito e o código-fonte abaixo:
//==================== Arquivo crono.h //===================
#include
#device adc=8
#FUSES NOWDT
#FUSES XT
#FUSES PUT
#FUSES NOPROTECT
#FUSES BROWNOUT
#FUSES NOLVP
#FUSES NOCPD
#FUSES NOWRT
#FUSES NODEBUG
#use delay(clock=4000000)
#define BOTAO1 PIN_A0
#define BOTAO2 PIN_A1
#define BOTAO3 PIN_A2
//================== Fim Arquivo crono.h //=================
//==================== Arquivo crono.c //===================
#include "crono.h"
short contando, contar;
int numeros[6] = {0,0,0,0,0,0};
int n = 0;
int c, t;
int passo = 10;
BYTE CONST CODIGO [10]= {0x3F,0X06,0X5B,0X4F,0X66,0X6D,0X7D,0X07,0X7F,0X6F};
#int_RTCC
void RTCC_isr(void)
{
set_timer0(get_timer0() + 6);
if (contando)
{
passo--;
if (passo == 0)
{
passo = 10;
t = 0;
contar = 1;
while (contar)
{
if (numeros[t] < 9)
{
numeros[t]++;
contar = 0;
}
else
{
numeros[t] = 0;
t++;
}
}
}
}
output_b(0b11111111);
if (n == 2)
output_c(CODIGO[numeros[n]] | 128);
else
output_c(CODIGO[numeros[n]]);
output_b(0b11111111 ^ (128 >> n));
n++;
if (n > 5) n = 0;
}
void main()
{
setup_adc_ports(NO_ANALOGS);
setup_adc(ADC_CLOCK_DIV_2);
setup_spi(SPI_SS_DISABLED);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_4);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DISABLED,0,1);
setup_ccp1(CCP_OFF);
enable_interrupts(INT_RTCC);
enable_interrupts(GLOBAL);
contando = 0;
while(1)
{
if (contando)
{
if (!input(BOTAO2))
{
contando = 0;
}
}
else
{
if (!input(BOTAO1))
contando = 1;
if (!input(BOTAO3))
{
for (c = 0; c < 6; c++)
numeros[c] = 0;
passo = 10;
}
}
}
}
//================== Fim Arquivo crono.c //=================
Assinale a alternativa CORRETA em função do funcionamento e operação do cronômetro:
Ao iniciar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, todos os botões “ON”, “OFF” e “RESET” são lidos sequencialmente e cada um deles tem uma função específica. O botão “ON” congela o display mais a contagem continua, o botão “OFF” para a contagem e o botão “RESET” zera o contador.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e é reconhecido em qualquer momento da operação.
Os microcontroladores da família STM32 possuem três modos de operação, assinale a alternativa que aponta esses três modos:
Principal / Normal / queda de energia.
Principal / baixo consumo / queda de energia.
Normal / baixo consumo / sleep.
Alto desempenho / normal / economia de energia.
Alto desempenho / principal / sleep.
Leia atentamente as sentenças abaixo referente ao protocolo de comunicação CAN:
I - Foi criado para ser utilizado em ambientes isolados, sem índice de ruídos e interferências, em sistemas que necessitem de transmissão de mensagens sem prioridade e não havendo a necessidade de serem enviadas em tempo real.
II - Para se fazer a comunicação dos equipamentos, torna-se necessário apenas dois pares de fios, nomeados de CANH (High), CANL (Low), CANC (Clock) e CANG (Ground). A alimentação dos dispositivos é fornecida juntamente com os cabos de dados.
III - No caso de um microcontrolador PIC não possuir um controlador CAN embutido, será necessário utilizar um transceiver, por exemplo, o MCP2551, da própria Microchip.
IV - O protocolo CAN é indicado para operar em ambientes externos, interligando equipamentos a longas distâncias.
É CORRETO apenas o que se afirma em:
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença I é verdadeira.
Apenas a sentença III é falsa.
Apenas a sentença IV é verdadeira.
Apenas a sentença IV é falsa.
O oscilador eletrônico dita o ritmo do sistema, produzindo um sinal repetitivo. Esse sinal é elétrico e pode ser dito pulsante, seus níveis de tensão variam em alto e baixo (sinal digital). Essa troca constante de sinal é conhecida como clock, resultando em uma onda quadrada. Dentre os osciladores abaixo, assinale a alternativa que contém o oscilador que produz uma senoide de amplitude e frequência constante, cuja frequência é ajustada variando os valores da indutância ou da capacitância, seguindo a fórmula:
Oscilador Pierce
Oscilador de cristal de quartzo
Oscilador Clapp
Oscilador Colpitts
Oscilador Hartley
_________ é um contador _________ da rotina da lógica. O valor é incrementado e caso a contagem __________, o microcontrolador entende como algum problema e reinicia automaticamente.
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
2.36 V
1.36 V
3.18 V
2.00 V
1.00 V
Observe o circuito e o código-fonte abaixo:
//==================== Arquivo crono.h //===================
#include
#device adc=8
#FUSES NOWDT
#FUSES XT
#FUSES PUT
#FUSES NOPROTECT
#FUSES BROWNOUT
#FUSES NOLVP
#FUSES NOCPD
#FUSES NOWRT
#FUSES NODEBUG
#use delay(clock=4000000)
#define BOTAO1 PIN_A0
#define BOTAO2 PIN_A1
#define BOTAO3 PIN_A2
//================== Fim Arquivo crono.h //=================
//==================== Arquivo crono.c //===================
#include "crono.h"
short contando, contar;
int numeros[6] = {0,0,0,0,0,0};
int n = 0;
int c, t;
int passo = 10;
BYTE CONST CODIGO [10]= {0x3F,0X06,0X5B,0X4F,0X66,0X6D,0X7D,0X07,0X7F,0X6F};
#int_RTCC
void RTCC_isr(void)
{
set_timer0(get_timer0() + 6);
if (contando)
{
passo--;
if (passo == 0)
{
passo = 10;
t = 0;
contar = 1;
while (contar)
{
if (numeros[t] < 9)
{
numeros[t]++;
contar = 0;
}
else
{
numeros[t] = 0;
t++;
}
}
}
}
output_b(0b11111111);
if (n == 2)
output_c(CODIGO[numeros[n]] | 128);
else
output_c(CODIGO[numeros[n]]);
output_b(0b11111111 ^ (128 >> n));
n++;
if (n > 5) n = 0;
}
void main()
{
setup_adc_ports(NO_ANALOGS);
setup_adc(ADC_CLOCK_DIV_2);
setup_spi(SPI_SS_DISABLED);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_4);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DISABLED,0,1);
setup_ccp1(CCP_OFF);
enable_interrupts(INT_RTCC);
enable_interrupts(GLOBAL);
contando = 0;
while(1)
{
if (contando)
{
if (!input(BOTAO2))
{
contando = 0;
}
}
else
{
if (!input(BOTAO1))
contando = 1;
if (!input(BOTAO3))
{
for (c = 0; c < 6; c++)
numeros[c] = 0;
passo = 10;
}
}
}
}
//================== Fim Arquivo crono.c //=================
Assinale a alternativa CORRETA em função do funcionamento e operação do cronômetro:
Ao iniciar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, todos os botões “ON”, “OFF” e “RESET” são lidos sequencialmente e cada um deles tem uma função específica. O botão “ON” congela o display mais a contagem continua, o botão “OFF” para a contagem e o botão “RESET” zera o contador.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e é reconhecido em qualquer momento da operação.
Os microcontroladores da família STM32 possuem três modos de operação, assinale a alternativa que aponta esses três modos:
Principal / Normal / queda de energia.
Principal / baixo consumo / queda de energia.
Normal / baixo consumo / sleep.
Alto desempenho / normal / economia de energia.
Alto desempenho / principal / sleep.
Leia atentamente as sentenças abaixo referente ao protocolo de comunicação CAN:
I - Foi criado para ser utilizado em ambientes isolados, sem índice de ruídos e interferências, em sistemas que necessitem de transmissão de mensagens sem prioridade e não havendo a necessidade de serem enviadas em tempo real.
II - Para se fazer a comunicação dos equipamentos, torna-se necessário apenas dois pares de fios, nomeados de CANH (High), CANL (Low), CANC (Clock) e CANG (Ground). A alimentação dos dispositivos é fornecida juntamente com os cabos de dados.
III - No caso de um microcontrolador PIC não possuir um controlador CAN embutido, será necessário utilizar um transceiver, por exemplo, o MCP2551, da própria Microchip.
IV - O protocolo CAN é indicado para operar em ambientes externos, interligando equipamentos a longas distâncias.
É CORRETO apenas o que se afirma em:
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença I é verdadeira.
Apenas a sentença III é falsa.
Apenas a sentença IV é verdadeira.
Apenas a sentença IV é falsa.
O oscilador eletrônico dita o ritmo do sistema, produzindo um sinal repetitivo. Esse sinal é elétrico e pode ser dito pulsante, seus níveis de tensão variam em alto e baixo (sinal digital). Essa troca constante de sinal é conhecida como clock, resultando em uma onda quadrada. Dentre os osciladores abaixo, assinale a alternativa que contém o oscilador que produz uma senoide de amplitude e frequência constante, cuja frequência é ajustada variando os valores da indutância ou da capacitância, seguindo a fórmula:
Oscilador Pierce
Oscilador de cristal de quartzo
Oscilador Clapp
Oscilador Colpitts
Oscilador Hartley
_________ é um contador _________ da rotina da lógica. O valor é incrementado e caso a contagem __________, o microcontrolador entende como algum problema e reinicia automaticamente.
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
Ao iniciar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, todos os botões “ON”, “OFF” e “RESET” são lidos sequencialmente e cada um deles tem uma função específica. O botão “ON” congela o display mais a contagem continua, o botão “OFF” para a contagem e o botão “RESET” zera o contador.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display inicia-se apagado, os dígitos só são mostrados quando iniciar a contagem e o botão “ON” é usado para esta finalidade. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” é possível iniciá-la novamente através do botão “ON”. O botão “RESET” é usado para zerar os valores e só é reconhecido quando a contagem estiver parada.
Ao ligar o cronômetro o display é preenchido com zeros, aguardando o acionamento o botão “ON” para iniciar a contagem. Uma vez contando, o único botão ativo é o botão “OFF”, que para a contagem. Ao parar a contagem com o botão “OFF” não é possível iniciá-la novamente. O botão “RESET” é usado para zerar os valores e é reconhecido em qualquer momento da operação.
Os microcontroladores da família STM32 possuem três modos de operação, assinale a alternativa que aponta esses três modos:
Principal / Normal / queda de energia.
Principal / baixo consumo / queda de energia.
Normal / baixo consumo / sleep.
Alto desempenho / normal / economia de energia.
Alto desempenho / principal / sleep.
Leia atentamente as sentenças abaixo referente ao protocolo de comunicação CAN:
I - Foi criado para ser utilizado em ambientes isolados, sem índice de ruídos e interferências, em sistemas que necessitem de transmissão de mensagens sem prioridade e não havendo a necessidade de serem enviadas em tempo real.
II - Para se fazer a comunicação dos equipamentos, torna-se necessário apenas dois pares de fios, nomeados de CANH (High), CANL (Low), CANC (Clock) e CANG (Ground). A alimentação dos dispositivos é fornecida juntamente com os cabos de dados.
III - No caso de um microcontrolador PIC não possuir um controlador CAN embutido, será necessário utilizar um transceiver, por exemplo, o MCP2551, da própria Microchip.
IV - O protocolo CAN é indicado para operar em ambientes externos, interligando equipamentos a longas distâncias.
É CORRETO apenas o que se afirma em:
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença I é verdadeira.
Apenas a sentença III é falsa.
Apenas a sentença IV é verdadeira.
Apenas a sentença IV é falsa.
O oscilador eletrônico dita o ritmo do sistema, produzindo um sinal repetitivo. Esse sinal é elétrico e pode ser dito pulsante, seus níveis de tensão variam em alto e baixo (sinal digital). Essa troca constante de sinal é conhecida como clock, resultando em uma onda quadrada. Dentre os osciladores abaixo, assinale a alternativa que contém o oscilador que produz uma senoide de amplitude e frequência constante, cuja frequência é ajustada variando os valores da indutância ou da capacitância, seguindo a fórmula:
Oscilador Pierce
Oscilador de cristal de quartzo
Oscilador Clapp
Oscilador Colpitts
Oscilador Hartley
_________ é um contador _________ da rotina da lógica. O valor é incrementado e caso a contagem __________, o microcontrolador entende como algum problema e reinicia automaticamente.
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
Principal / Normal / queda de energia.
Principal / baixo consumo / queda de energia.
Normal / baixo consumo / sleep.
Alto desempenho / normal / economia de energia.
Alto desempenho / principal / sleep.
Leia atentamente as sentenças abaixo referente ao protocolo de comunicação CAN:
I - Foi criado para ser utilizado em ambientes isolados, sem índice de ruídos e interferências, em sistemas que necessitem de transmissão de mensagens sem prioridade e não havendo a necessidade de serem enviadas em tempo real.
II - Para se fazer a comunicação dos equipamentos, torna-se necessário apenas dois pares de fios, nomeados de CANH (High), CANL (Low), CANC (Clock) e CANG (Ground). A alimentação dos dispositivos é fornecida juntamente com os cabos de dados.
III - No caso de um microcontrolador PIC não possuir um controlador CAN embutido, será necessário utilizar um transceiver, por exemplo, o MCP2551, da própria Microchip.
IV - O protocolo CAN é indicado para operar em ambientes externos, interligando equipamentos a longas distâncias.
É CORRETO apenas o que se afirma em:
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença I é verdadeira.
Apenas a sentença III é falsa.
Apenas a sentença IV é verdadeira.
Apenas a sentença IV é falsa.
O oscilador eletrônico dita o ritmo do sistema, produzindo um sinal repetitivo. Esse sinal é elétrico e pode ser dito pulsante, seus níveis de tensão variam em alto e baixo (sinal digital). Essa troca constante de sinal é conhecida como clock, resultando em uma onda quadrada. Dentre os osciladores abaixo, assinale a alternativa que contém o oscilador que produz uma senoide de amplitude e frequência constante, cuja frequência é ajustada variando os valores da indutância ou da capacitância, seguindo a fórmula:
Oscilador Pierce
Oscilador de cristal de quartzo
Oscilador Clapp
Oscilador Colpitts
Oscilador Hartley
_________ é um contador _________ da rotina da lógica. O valor é incrementado e caso a contagem __________, o microcontrolador entende como algum problema e reinicia automaticamente.
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença I é verdadeira.
Apenas a sentença III é falsa.
Apenas a sentença IV é verdadeira.
Apenas a sentença IV é falsa.
O oscilador eletrônico dita o ritmo do sistema, produzindo um sinal repetitivo. Esse sinal é elétrico e pode ser dito pulsante, seus níveis de tensão variam em alto e baixo (sinal digital). Essa troca constante de sinal é conhecida como clock, resultando em uma onda quadrada. Dentre os osciladores abaixo, assinale a alternativa que contém o oscilador que produz uma senoide de amplitude e frequência constante, cuja frequência é ajustada variando os valores da indutância ou da capacitância, seguindo a fórmula:
Oscilador Pierce
Oscilador de cristal de quartzo
Oscilador Clapp
Oscilador Colpitts
Oscilador Hartley
_________ é um contador _________ da rotina da lógica. O valor é incrementado e caso a contagem __________, o microcontrolador entende como algum problema e reinicia automaticamente.
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
Oscilador Pierce
Oscilador de cristal de quartzo
Oscilador Clapp
Oscilador Colpitts
Oscilador Hartley
_________ é um contador _________ da rotina da lógica. O valor é incrementado e caso a contagem __________, o microcontrolador entende como algum problema e reinicia automaticamente.
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
Timer - independente - chegar em 255
Timer - independente - estourar
Timer - dependente - chegar em 255
WatchDog - dependente - chegar em 255
WatchDog - independente - estoure
O SAP1 (Simple-As-Possible) é uma arquitetura de um sistema microcontrolado, sendo formado por diversos blocos. Dentre esse blocos, o ____________________ é responsável por armazenar o programa, sendo que todas as instruções são armazenadas sequencialmente. Além disso, ele possui a tarefa de enviar à memória o endereço da próxima instrução a ser buscada e executada.
Com base no texto acima, complete o espaço em branco com o bloco do SAP1 correspondente.
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
controlador sequenciador
entrada e REM
RAM
registrador de instruções
contador de programa
Leia atentamente as sentenças abaixo, referente ao microcontrolador STM32:
I - O dispositivo SMT32 pode ser alimentado com uma tensão de operação de 4,5 a 5,5V.
II - A família STM32F10xxx possui alguns modelos, cujo encapsulamentos pode ser de 8 a 40 pinos.
III - A família STM32F10xxx não possui compatibilidade total entre eles com relação a pinagem, software e recursos. Portanto, caso seja necessário realizar a substituição por um outro STM32F10xxx, com mais memória, por exemplo, será necessário alterar as conexões.
IV - O STM32 possui um sensor de temperatura que gera uma tensão que é linearmente proporcional à variação da temperatura. O intervalo de conversão é entre 2 V < VDDA < 3,6 V. O sensor de temperatura é internamente conectado ao canal de entrada ADC12_IN16.
É CORRETO apenas o que se afirma em:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.
Analise as assertivas sobre as Memórias Semicondutoras voláteis:
I - A memória tipo DRAM usa capacitores com células de armazenamento de dados.
II - A memória tipo SRAM usa FLIP-FLOPS com células de armazenamento de dados.
III - A memória tipo SRAM consome menos energia por bit armazenado.
IV - A memória tipo DRAM possui menor densidade de armazenamento por área do CHIP.
V - A memória tipo SRAM possui três ciclos de trabalho: leitura, escrita e refrescamento (reconhecer e reenergizar os capacitores).
Marque, a seguir, a alternativa que contém as assertivas corretas:
Apenas a sentença I é falsa.
Apenas as sentenças III e IV são verdadeiras.
Apenas a sentença IV é verdadeira.
Todas as sentenças são verdadeiras.
Todas as sentenças são falsas.