PROJETOS DE AUTOMAÇÃO INDUSTRIAL
Na fase de definição FEL-3 (Definition), normalmente, é exigido apresentar à direção um projeto que tenha a combinação certa de risco global e desempenho econômico.
As estratégias incluem:
programa preliminar do projeto.
relatório da análise de riscos de processos.
plano de execução do projeto da fase EPC (Engineering, Procurement and Construction - Engenharia, Compras e Construção).
lista de especificações preliminares do equipamento dimensionado.
seleção de tecnologia.
Grafcet (acrónimo do francês Graphe Fonctionnel de Commande, Étapes Transitions) é uma metodologia que surge com a necessidade do desenvolvimento de programas para controle de processos sequenciais.
A respeito do Grafcet, verifique a(s) assertiva(s) verdadeira(s):
I) O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe.
II) O Grafcet tem o objetivo de descrever o comportamento de sistemas automatizados.
III) Surge da necessidade de desenvolvimento de programas de controle para processos condicionais.
Está(ão) correta(s):
I e III.
Apenas II.
I e II.
Apenas I.
I,II e III.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 79 °C e uma variável de processo de 41 °C terá o erro em porcentagem de aproximadamente:
51.90 %
79.37 %
-31.75 %
-58.20 %
48.10 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 40 °C e uma variável de processo de 59 °C terá o erro em porcentagem de aproximadamente:
-37.05 %
30.88 %
-47.50 %
147.50 %
32.30 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 73 °C e uma variável de processo de 76 °C terá o erro em porcentagem de aproximadamente:
104.11 %
-2.18 %
-4.11 %
2.59 %
7.23 %
Um controlador fornece uma saída cuja taxa de variação é proporcional ao desvio de erro. Esse controlador é do tipo:
Controladores de Ação Integral (modo I).
Controlador Proporcional-Derivativo (Modo PD).
Controlador Proporcional e Integral (modo PI).
Controlador Derivativo (Modo D).
Controlador Proporcional (modo P).
O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe. O Grafcet não pretende minimizar as funções lógicas que representam a dinâmica do sistema, pelo contrário, o seu potencial reside na imposição de um funcionamento rigoroso, evitando, dessa forma, incoerências, bloqueios ou conflitos durante o funcionamento dele.
Veja a figura e responda:
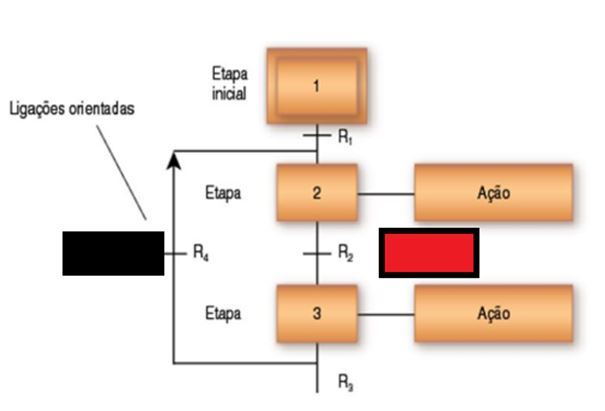
Como se chama a etapa que está marcada de vermelho?
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
programa preliminar do projeto.
relatório da análise de riscos de processos.
plano de execução do projeto da fase EPC (Engineering, Procurement and Construction - Engenharia, Compras e Construção).
lista de especificações preliminares do equipamento dimensionado.
seleção de tecnologia.
Grafcet (acrónimo do francês Graphe Fonctionnel de Commande, Étapes Transitions) é uma metodologia que surge com a necessidade do desenvolvimento de programas para controle de processos sequenciais.
A respeito do Grafcet, verifique a(s) assertiva(s) verdadeira(s):
I) O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe.
II) O Grafcet tem o objetivo de descrever o comportamento de sistemas automatizados.
III) Surge da necessidade de desenvolvimento de programas de controle para processos condicionais.
Está(ão) correta(s):
I e III.
Apenas II.
I e II.
Apenas I.
I,II e III.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 79 °C e uma variável de processo de 41 °C terá o erro em porcentagem de aproximadamente:
51.90 %
79.37 %
-31.75 %
-58.20 %
48.10 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 40 °C e uma variável de processo de 59 °C terá o erro em porcentagem de aproximadamente:
-37.05 %
30.88 %
-47.50 %
147.50 %
32.30 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 73 °C e uma variável de processo de 76 °C terá o erro em porcentagem de aproximadamente:
104.11 %
-2.18 %
-4.11 %
2.59 %
7.23 %
Um controlador fornece uma saída cuja taxa de variação é proporcional ao desvio de erro. Esse controlador é do tipo:
Controladores de Ação Integral (modo I).
Controlador Proporcional-Derivativo (Modo PD).
Controlador Proporcional e Integral (modo PI).
Controlador Derivativo (Modo D).
Controlador Proporcional (modo P).
O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe. O Grafcet não pretende minimizar as funções lógicas que representam a dinâmica do sistema, pelo contrário, o seu potencial reside na imposição de um funcionamento rigoroso, evitando, dessa forma, incoerências, bloqueios ou conflitos durante o funcionamento dele.
Veja a figura e responda:
Como se chama a etapa que está marcada de vermelho?
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
I e III.
Apenas II.
I e II.
Apenas I.
I,II e III.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 79 °C e uma variável de processo de 41 °C terá o erro em porcentagem de aproximadamente:
51.90 %
79.37 %
-31.75 %
-58.20 %
48.10 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 40 °C e uma variável de processo de 59 °C terá o erro em porcentagem de aproximadamente:
-37.05 %
30.88 %
-47.50 %
147.50 %
32.30 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 73 °C e uma variável de processo de 76 °C terá o erro em porcentagem de aproximadamente:
104.11 %
-2.18 %
-4.11 %
2.59 %
7.23 %
Um controlador fornece uma saída cuja taxa de variação é proporcional ao desvio de erro. Esse controlador é do tipo:
Controladores de Ação Integral (modo I).
Controlador Proporcional-Derivativo (Modo PD).
Controlador Proporcional e Integral (modo PI).
Controlador Derivativo (Modo D).
Controlador Proporcional (modo P).
O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe. O Grafcet não pretende minimizar as funções lógicas que representam a dinâmica do sistema, pelo contrário, o seu potencial reside na imposição de um funcionamento rigoroso, evitando, dessa forma, incoerências, bloqueios ou conflitos durante o funcionamento dele.
Veja a figura e responda:
Como se chama a etapa que está marcada de vermelho?
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
51.90 %
79.37 %
-31.75 %
-58.20 %
48.10 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 40 °C e uma variável de processo de 59 °C terá o erro em porcentagem de aproximadamente:
-37.05 %
30.88 %
-47.50 %
147.50 %
32.30 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 73 °C e uma variável de processo de 76 °C terá o erro em porcentagem de aproximadamente:
104.11 %
-2.18 %
-4.11 %
2.59 %
7.23 %
Um controlador fornece uma saída cuja taxa de variação é proporcional ao desvio de erro. Esse controlador é do tipo:
Controladores de Ação Integral (modo I).
Controlador Proporcional-Derivativo (Modo PD).
Controlador Proporcional e Integral (modo PI).
Controlador Derivativo (Modo D).
Controlador Proporcional (modo P).
O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe. O Grafcet não pretende minimizar as funções lógicas que representam a dinâmica do sistema, pelo contrário, o seu potencial reside na imposição de um funcionamento rigoroso, evitando, dessa forma, incoerências, bloqueios ou conflitos durante o funcionamento dele.
Veja a figura e responda:
Como se chama a etapa que está marcada de vermelho?
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
-37.05 %
30.88 %
-47.50 %
147.50 %
32.30 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 73 °C e uma variável de processo de 76 °C terá o erro em porcentagem de aproximadamente:
104.11 %
-2.18 %
-4.11 %
2.59 %
7.23 %
Um controlador fornece uma saída cuja taxa de variação é proporcional ao desvio de erro. Esse controlador é do tipo:
Controladores de Ação Integral (modo I).
Controlador Proporcional-Derivativo (Modo PD).
Controlador Proporcional e Integral (modo PI).
Controlador Derivativo (Modo D).
Controlador Proporcional (modo P).
O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe. O Grafcet não pretende minimizar as funções lógicas que representam a dinâmica do sistema, pelo contrário, o seu potencial reside na imposição de um funcionamento rigoroso, evitando, dessa forma, incoerências, bloqueios ou conflitos durante o funcionamento dele.
Veja a figura e responda:
Como se chama a etapa que está marcada de vermelho?
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
104.11 %
-2.18 %
-4.11 %
2.59 %
7.23 %
Um controlador fornece uma saída cuja taxa de variação é proporcional ao desvio de erro. Esse controlador é do tipo:
Controladores de Ação Integral (modo I).
Controlador Proporcional-Derivativo (Modo PD).
Controlador Proporcional e Integral (modo PI).
Controlador Derivativo (Modo D).
Controlador Proporcional (modo P).
O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe. O Grafcet não pretende minimizar as funções lógicas que representam a dinâmica do sistema, pelo contrário, o seu potencial reside na imposição de um funcionamento rigoroso, evitando, dessa forma, incoerências, bloqueios ou conflitos durante o funcionamento dele.
Veja a figura e responda:
Como se chama a etapa que está marcada de vermelho?
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
Controladores de Ação Integral (modo I).
Controlador Proporcional-Derivativo (Modo PD).
Controlador Proporcional e Integral (modo PI).
Controlador Derivativo (Modo D).
Controlador Proporcional (modo P).
O diagrama funcional Grafcet permite descrever os comportamentos de um automatismo em função das informações que recebe. O Grafcet não pretende minimizar as funções lógicas que representam a dinâmica do sistema, pelo contrário, o seu potencial reside na imposição de um funcionamento rigoroso, evitando, dessa forma, incoerências, bloqueios ou conflitos durante o funcionamento dele.
Veja a figura e responda:
Como se chama a etapa que está marcada de vermelho?
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
Elemento.
Mudança.
Receptividade.
Transição.
Troca.
O projeto de um controlador nem sempre é suficientemente completo, e os métodos de autoajuste, por serem genéricos, muitas vezes fornecem ajustes que podem ser melhorados.
Nesse contexto, entram os controladores PID. Em relação aos PID, analise as assertivas a seguir:
I) Um controlador PID, também chamado de controlador de três modos, pode ser usado para controlar quase qualquer processo que envolve atrasos e tempos mortos.
II)A associação das três ações de controle não nos permite obter um tipo de controle que reúne os modos de controles, pois depende do processo.
III) A grande maioria de controladores PID industriais incorporam recursos de “Auto-Tune”.
Está(ão) correta(s):
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
III e II.
Apenas a II.
I e II.
I e III.
Apenas a I.
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 48 °C e uma variável de processo de 64 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %
O CLP que recebe dados de variáveis de processo e de pontos de ajuste em forma de sinal analógico expressará o erro como uma função analógica. Do mesmo modo, um sistema com um ponto de ajuste de 50 °C e uma variável de processo de 42 °C terá o erro em porcentagem de aproximadamente:
-53.00 %
51.67 %
17.00 %
133.33 %
-33.33 %